United States of America (1962)
Self-Propelled Gun – Proposal Only
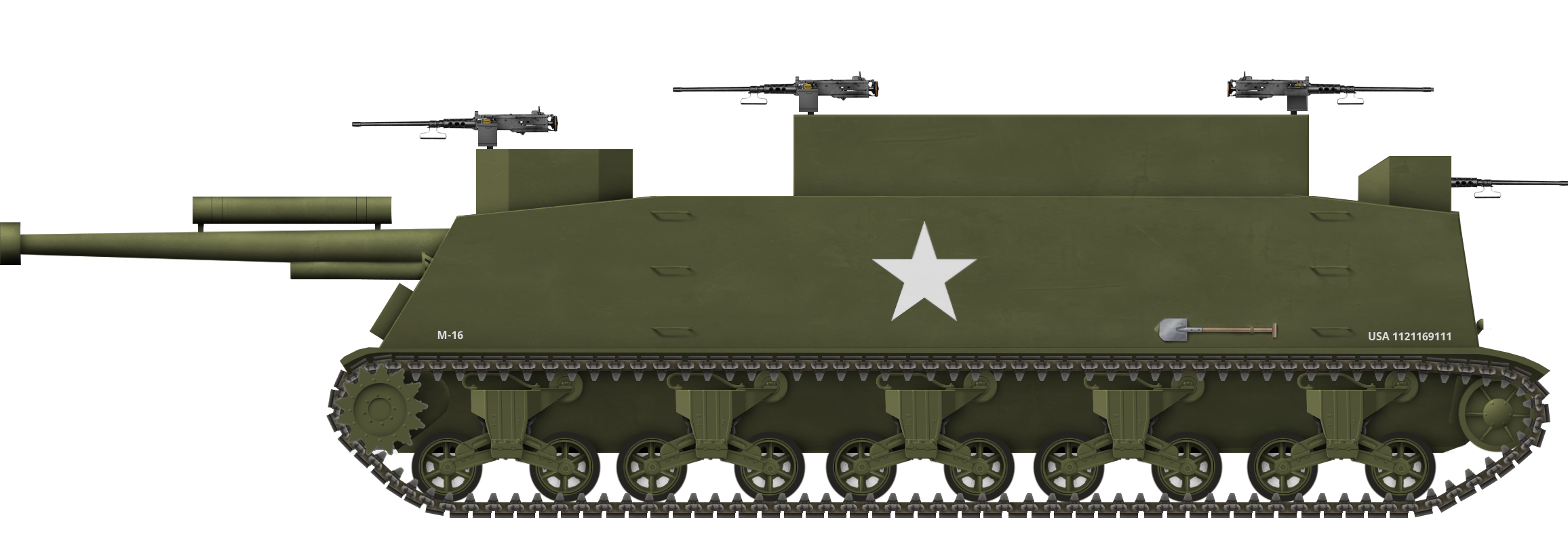
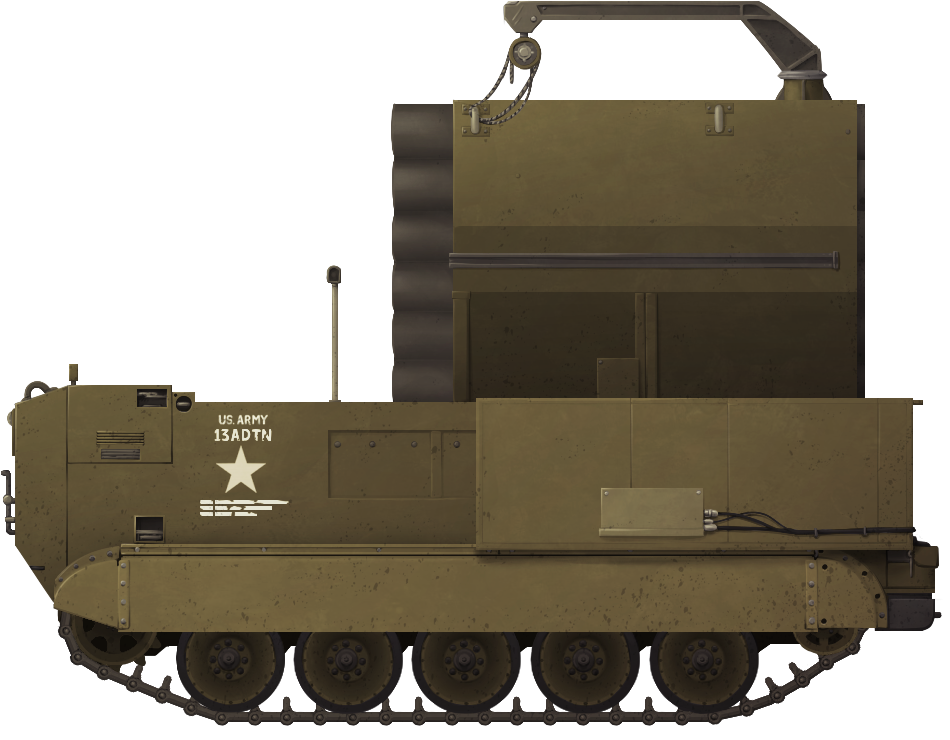
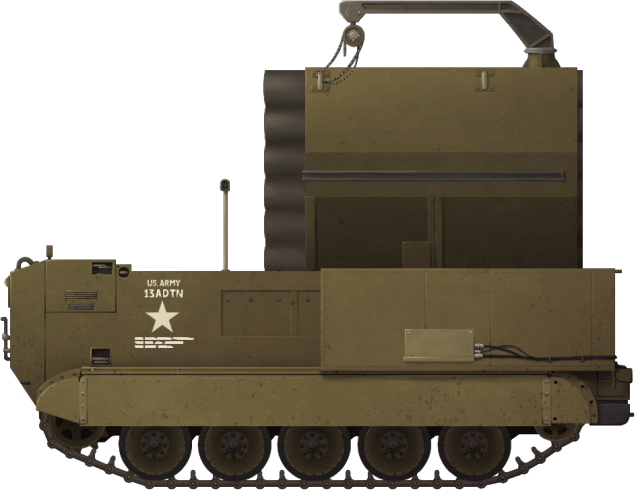
In 1962, an up and coming tank designer drew up plans for a new type of fighting vehicle. Ostensibly a self-propelled gun, the design was closer to a hybrid between an assault gun and a Vietnam gun truck, with the forward half of the vehicle dedicated to a 105 mm howitzer, and the rearward half to an elevated platform with multiple mounted machine guns. This was the brainchild of Mark Kubiak, a boy living in Spokane, Washington. He called the vehicle “M-16”, clearly confident enough in its adoption by the Army that it would not require a prototype “T” number, yet distinct from the Army’s own nomenclature, which did not use dashes.
From the Mind of Babes
While the chassis was unspecified, it clearly took inspiration from the M4 Sherman. The running gear consisted of 5 Vertical Volute Spring Suspension (VVSS) units per side, each having 2 roadwheels and built-in return rollers. The drive sprocket is assumed to be at the front, as the idler at the rear extends somewhat beyond the rear of the tank, again much like the Sherman family of vehicles.
Mounted directly over the drive sprockets was an unspecified 105mm howitzer, which, due to its design and the time period, can be reasonably inferred to be an M101, a World War II artillery piece formerly known as the M2A1, which continued to see service throughout the Vietnam War. The placement of the main armament so far forward would certainly have caused suspension issues, and the transmission being mounted directly underneath would have greatly reduced the gun’s ability to elevate. Beside the howitzer was a raised, circular position resembling the “pulpit” of the M7 Priest, having a pintle-mounted M2 Browning .50 caliber machine gun. It is not specified whether this machine gun position was to the left or right of the cannon, but given that the driver would necessarily be on the side opposite the machine gunner, and that an ammunition rack was placed on the left, the machine gun position was most likely to the left of the howitzer and the driver seated to the right. Rearward of the machine gun position was a spacious open-topped fighting compartment for the crew servicing the 105mm howitzer, likely consisting of a gunner and at least two cannoneers. Ammunition racks were placed along either side wall, and in the front left corner of the fighting compartment.
Rearward of the main fighting compartment was a raised passenger/secondary fighting compartment, built on top of and around the engine. A pintle-mounted M2 Browning was placed on the front wall of this compartment and another on the rear wall, both on the centerline of the vehicle. The raised position of the secondary fighting compartment would allow the forward machine gunner to fire over the heads of the howitzer crew. .50 caliber ammunition was stowed along the walls on both sides of the secondary fighting compartment.
At the very rear of the vehicle was a small, open-topped one-man turret mounting another M2 Browning. It was offset slightly to port (left) from the centerline of the vehicle and was provided with its own ammunition rack, in the left rear corner of the hull. Presumably, the operator of this machine gun could only enter his position via the turret, an unpleasant and psychologically-daunting place to be, next to the engine and separated from the rest of the crew.
Armor is unspecified, but was likely only enough to withstand small arms fire. For a vehicle of this size, even a small increase in armor would result in a large increase in weight, and heavy armor would be wasted on an open-topped vehicle to which the greatest threat would be artillery and mortar fire.
The only measurement given as to the size of the vehicle was that it should be “about 15 yards (13.7 m) long”. Even if this is taken to include the overhang of the barrel, at 45 feet long the M-16 would be truly enormous. For comparison, the length of the M4 Sherman was about 20 feet (6.1 m), and the length of the K-Wagen, the largest tank ever built in terms of dimensions, was just under 43 feet (13 m). Scaling the design off of the VVSS suspension units would result in a length of about 40 feet (12.2 m), near enough to the inventor’s stated figure that the difference may just be an error in the drawing.
The ammunition load of the vehicle was specified by weight, 100 pounds (45.4 kg) of .50 caliber ammunition and 500 pounds (226.8 kg) of 105 mm shells. Mr. Kubiak seems to have greatly underestimated the weight of ammunition, as 100 pounds would only account for three 100-round .50 caliber belts, while the vehicle has four .50 caliber guns and numerous ammo racks. A more reasonable number would be sixteen 100-round canisters, weighing about 560 pounds (254 kg). The standard HE shell used by both the 105mm M101 and M103 cannons (the latter being the gun mounted in the T195, mentioned later) was the Cartridge, 105 mm HE, M1, which weighed 40 pounds (18 kg). This means that the vehicle, as described, would only carry 12.5 rounds. A complement of 86 rounds of 105 mm ammunition, the same number carried by the vehicle to which the M-16 would be compared by the Army, would weigh 3,440 pounds (1,560 kg).
Directly to the Top
The blueprints were delivered in a small unassuming envelope with a 4 cent stamp, canceled at a Spokane, Washington post office at 4:10 PM on November 15, 1962. The letter was addressed to none other than President John F. Kennedy, with the address written simply as “White House, Washington D.C.”. The handwriting on the envelope did not match Mr. Kubiak’s, probably being written by one of his parents. Along with the original blueprints for the vehicle, a letter of explanation was enclosed. It read:
“Mr. President, The M-16 contains 105-MM Howitzer and 4 50-caliber machine guns its length is al should be about 15 yards long. It should carry 500 pounds of howitzer shells and 50 100 pounds of 50-caliber machine gun bullets. – Mark Kubiak, 112 W 33rd, Spokane 42 Wash.
PS. it can shoot down planes and destroy tanks and other vehicles.”
Despite the matter being on the order of importance befitting the Commander in Chief, regulations dictated that the message was passed through channels via the Department of the Army, Office of the Chief of Staff on 26 November, to the Office of the Chief of Research and Development, and thereunder to the Combat Materiel Division, which evaluated the proposal. The evaluation process itself was unfortunately not recorded, but it seems that the M-16 was written off summarily. The Memorandum for the Record, which was written up by Major Benjamin B. Williams and dated 18 December 1962, records the pertinent facts of the case, and summarizes the final action taken was to send a letter to Mr. Kubiak informing him of the similarities between his design and the existing T195E1, which would later be standardized as the M108 self-propelled howitzer. Additionally, the Memorandum noted that Mr. Kubiak’s age was estimated to be 8 to 11 years old based on the letter and sketches he submitted.
The T195E1 105mm self-propelled howitzer. This is serial number 5, the last survivor. (Photo Taken by Author)
The letter of response was prepared on 18 December by Major Williams and signed by Colonel Brooks O. Norman, Chief of the Combat Materiel Division, and was dispatched the next day. It informed Mr. Kubiak that his letter to the President was forwarded to this office, and pointed out that his ideas about self-propelled artillery doctrine were in line with the Army’s, but that the Army already had a design very similar to the M-16 which was in the final stages of development and would be issued to units soon, the T195E1, of which a photograph was forwarded. Colonel Norman went on to contrast the two designs, pointing out that the T195E1 was only half the length of the M-16, and that it carried much more 105mm ammunition. The T195E1 carried about the same amount of .50 caliber ammunition as the M-16, but only had one machine gun instead of four, clearly making it inferior in the anti-aircraft role. Colonel Norman also mentioned that the T195E1 carried a bazooka for anti-tank purposes, but this was hardly a unique ability; the M-16’s spacious passenger compartment would have ample room for additional ammunition and multiple shoulder-launched weapons. Perhaps the Colonel was alluding to this for possible inclusion on an anticipated revised design of the M-16, as the Office had notably declined to reject Mr. Kubiak’s proposal. Perhaps there was potential in the idea, if only the inventor would clarify the distinction in role between the M-16 and T195.
Unfortunately, Mr. Kubiak did not seem to recognize the invitation to further development, as no response was recorded from him. The M-16 was but one design in a vast sea of weapon proposals submitted by civilians, most being totally impractical, physically impossible, or just useless. While flawed, the M-16 was nowhere near the worst of such proposals. Its design shows greater understanding of tank design than that of many adults who also wrote in to the Army to pitch their tank ideas.
Mark Kubiak’s M-16. Illustration by Pavel Alexe.
Sources
OCRD Project Control Files of the Combat Arms Branch, Correspondence File “252/7 105mm Howitzer FY 62”
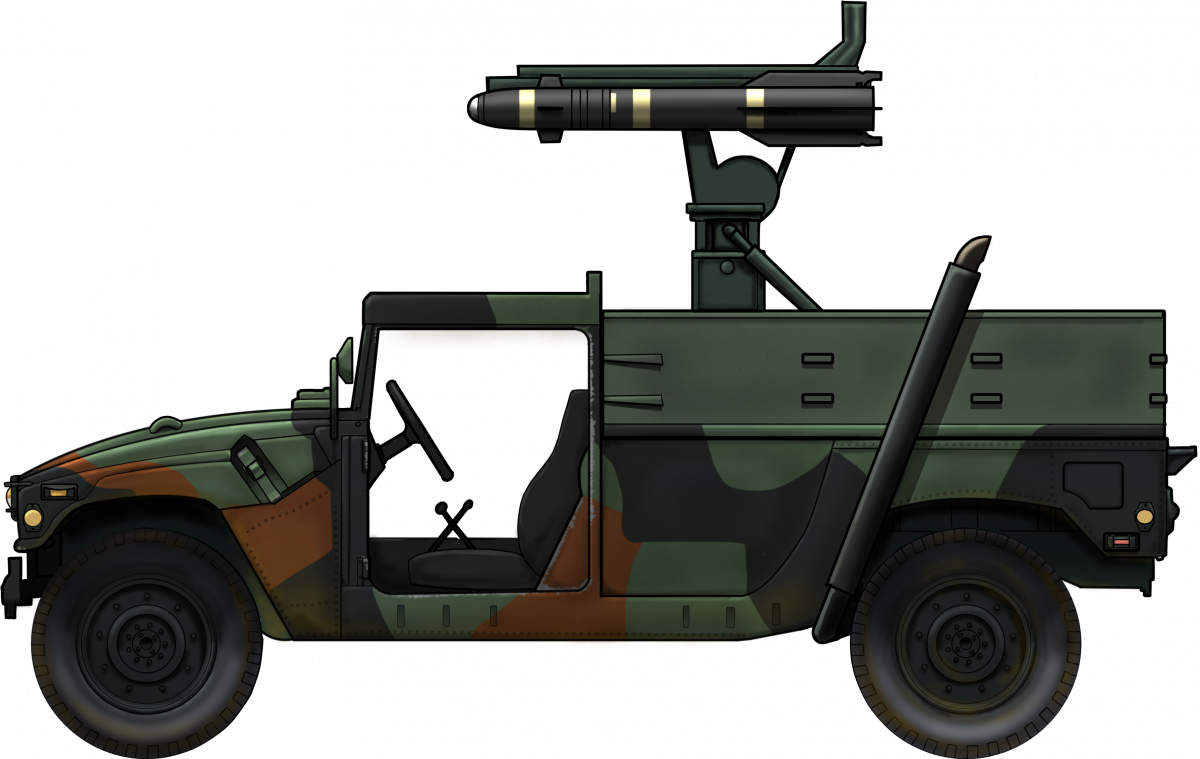
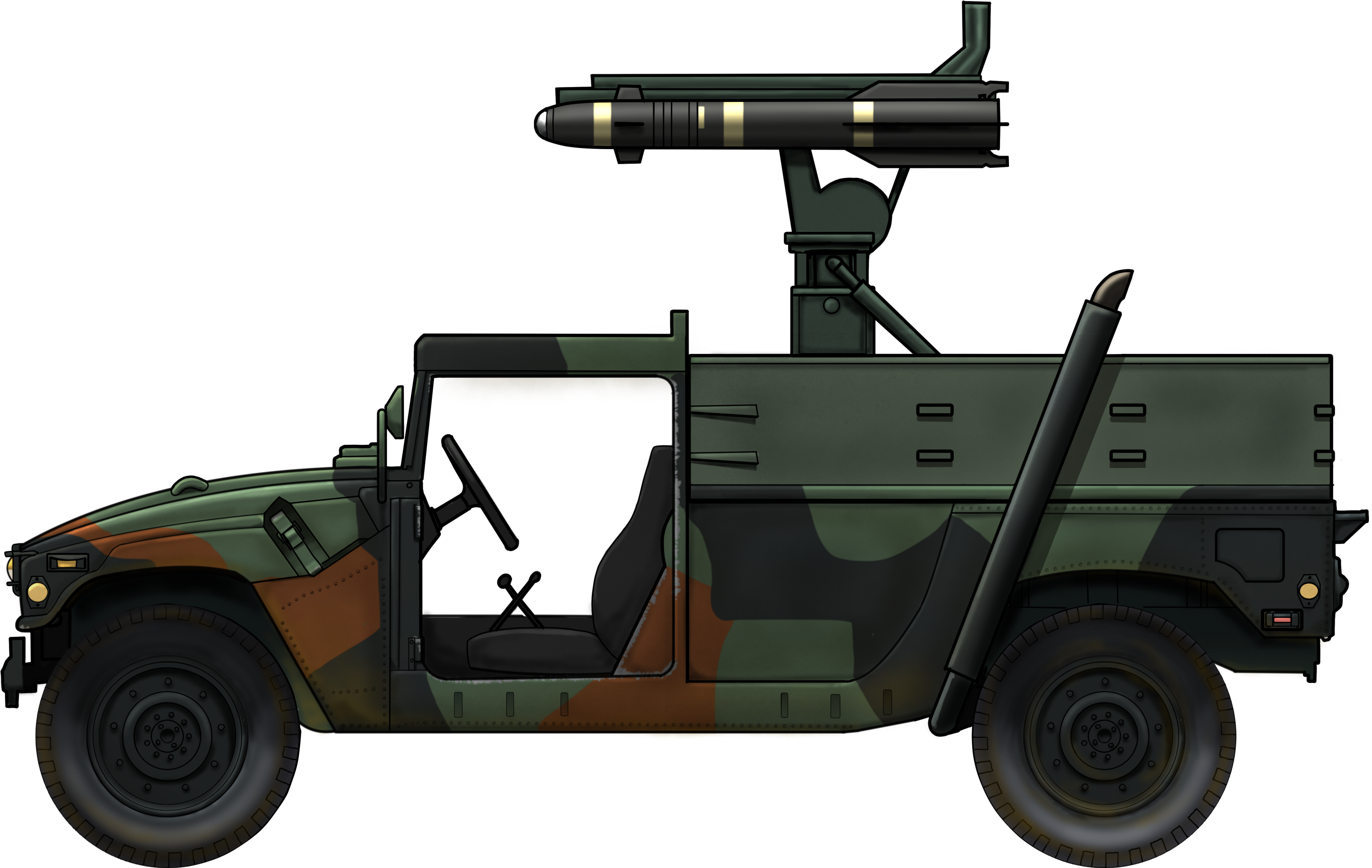
M998 GLH-L ‘Ground Launched Hellfire - Light’. Illustration by hansclaw.
United States of America (1987-1991)
Missile Tank Destroyer – 5 Built
The AGM-114 ‘Hellfire’ missile was developed by the US Army specifically to counter modern Soviet main battle tanks in a potential clash of superpowers during a Cold War-turned-hot scenario. Thankfully for all concerned, such a conflict did not erupt, the Cold War ending with the collapse of the Soviet Union.
The missile itself is a third-generation anti-tank missile capable of both air-launch (originally from the Advanced Attack Helicopter program by Hughes Aircraft Company) but also from the ground, in a line of development dating back to the late 1960s with the LASAM (LAser Semi Active Missile) and MISTIC (MIssile System Target Illuminator Controlled) programs. By 1969, MYSTIC, the over the horizon laser missile program, had transitioned into a new program known as the ‘Heliborne Laser Fire and Forget Missile’, shortly thereafter renamed ‘Heliborne Launched Fire and Forget Missile’, later shortened to just ‘Hellfire’.
By 1973, the Hellfire was already being offered for procurement by Rockwell International based in Columbus, Ohio and to be manufactured by Martin Marietta Corporation. Somewhat misleadingly, it was still being considered or labelled by some as a ‘fire and forget’ type of weapon.
Procurement and limited manufacturing followed, with the first test firings of the finished product, known as the YAGM-114A, at Redstone Arsenal in September 1978. With some modifications to the infra-red seeker of the missile and Army trials completed in 1981, full scale production began in early 1982. The first units were fielded by the US Army in Europe at the end of 1984. It is worthy of note that, as far back as 1980, the US Army was considering how to leverage the Hellfire onto a ground-launched platform.
Targeting
Despite occasionally being mislabelled as a fire and forget missile, the Hellfire can, in fact, be used quite differently. Fire and Forget implies that, once the weapon is locked onto a target, it could be fired and then the launch vehicle could retreat to a safe distance or move on to the next target. This was not strictly correct, as the missile also had the ability to have its trajectory changed during flight by up to 20 degrees from the original and up to a 1,000 m each way.
Targeting for the missile was by means of a laser which was projected from a designator, either in the air or on the ground, regardless of from where the missile was launched. An air-launched Hellfire could, for example, be targeted onto an enemy vehicle by a ground designation laser or by other designating aircraft. The missile was not limited to ground targets either, it could also be used to target aircraft, with some emphasis on its ability to counter enemy attack helicopters. Thus, the missile gained a substantial survivability bonus for a launch vehicle, as it did not have to remain in situ and could even be fired from over the horizon, such as over a hill at targets beyond.
The TOW (Tube-launched Optically-tracked, Wire commanded linked) was already available in the US arsenal, but Hellfire offered some things that TOW did not. For example, it had an increased standoff capacity along with an increased range, an increased versatility of use, as the TOW was not suitable for anti-aircraft use, as well as improved physical performance such as armor penetration, explosive blast, and a shorter flight time due to travelling more quickly.
With a continuous laser seeker on the missile following the designation applied, the missile could easily target moving vehicles whilst being harder to intercept or counter (by engaging the launcher).
Improvements in ballistics through the 1980s improved the Hellfire design and the weapon has a maximum effective range quoted as being up to 8 km, with longer ranges being achieved with a reduction in accuracy due mainly to attenuation of the laser beam. Data from the US Department of Defense (D.O.D.), however, provides a maximum direct fire range of 7 km, with indirect fire out to 8 km and a minimum engagement range of 500 m.
The Hellfire missile was first used in anger during the invasion of Panama in December 1989, with 7 missiles being fired, all of which hit their targets.
Basic layout of the Hellfire missile family, showing the 4 sections.
Source: fas.org Cutaway view of Hellfire II missile.
Source: Defenceindustrydaily.com
Ground Launched Hellfire – Light (GLH-L)
By 1991, the success of the Hellfire was readily apparent, as was the potential it offered to the user. With improved anti-armor capabilities, the Army sought to install Hellfire missiles onto ground vehicles for use, ostensibly by the 9th Infantry Division to complete a concept first considered for the unit back in February 1987. This was a light infantry division and had a specific need for improved anti-armor firepower. In order to achieve this need, the HMMWV was selected to be the mount for these missiles. With a maximum effective range of 7 km, the Hellfire in the ground role extended the anti-armor capacity of the division, especially when it had the ability to be guided onto target remotely by a forward-deployed laser designator known as the Combat Observing Lasing Team (COLT) using a device like the G/VLLD or MULE laser designators. Some US$2 million (US$4.7 million in 2020 values) were allocated by the US Congress within the defence budget for development of this project, with the somewhat ambitious plan to have 36 systems deployed by the 9th Infantry Division within 22 months at an additional cost of $22 million for development and $10.6 million for procurement for a total concept to deliver cost of US$34.6 million (US$82.7 million in 2020 values).
The ambitious time scale for development and delivery of GLH-L to 9th Infantry Division.
Source: US Department of Defense
Development took place on an ‘off-the-shelf’ basis, meaning it used existing hardware and software rather than redesigning a system from scratch. In this case, the system selected as the donor was the hardware from the Swedish shore defence missile program. Funding for the project also came from Sweden, with five vehicles made for trials. Sweden had already been involved in Hellfire since at least 1984, expressing an interest in the system to fill the role of a coastal defence missile. They had already done significant work and were likely trying to sell back some of the technology they had developed for the system, followed by an agreement for deliveries between the two countries in April 1987.
This was a light system for a light mobile force and was operated as the ‘Ground Launched Hellfire – Light’ (GLH-L) program, as a sub-part of a wider GLH program for both light and heavy vehicles.
GLH-L M998 HMMWV during Hellfire firing trials.
Source: AMCOM
The mounts for the GLH-L took the form of the standard cargo-bodied HMMWV vehicle M998. Development was due for completion by 1991 and 5 such vehicles were modified.
M998 HMMWV
The M998 High Mobility Multipurpose Wheeled Vehicle (HMMWV) was the US Army’s replacement vehicle for the M151 Jeep, entering service in the early 1980s. The vehicle was to fulfill a variety of general and light utility roles but also as a platform to carry unit level equipment. One of those roles was to carry a TOW missile launcher on top and, with that mounting, the vehicle was either the M966, M1036, M1045, or M1046, depending on whether the vehicle had supplemental armor and/or a winch or not.
At over 2.3 tonnes, 4.5 metres long and over 2.1 metres wide, the M998 is roughly the length of a family saloon car but substantially wider and nearly twice the weight. Powered by a 6.2 litre diesel engine, the M998, in its Cargo Configuration, as converted to mount the GLH-L, was capable of up to 100 km/h on a good road.
Testing
The vehicles built were sent for testing by TRADOC (US Army Training, Doctrine, and Command) and, with firing trials set to take place at the field laboratory of the Test and Experimentation Command (TEXCOM) at Fort Hunter-Liggett in California in June 1991. However, no orders were even expected for the system. Nonetheless, the firing trials were successful and firing blind over the crest of a hill at a static tank target 3.5 km away saw a missile hit.
This was followed by exercise trials with TOW missile operators from 2nd Battalion, 27th Regiment, 7th Infantry Division crewing the GLH-L vehicles, opposed by crews from the TEXCOM Experimentation Centre (T.E.C.) manning M1A1 Abrams tanks during simulated engagements. The TOW operators received an additional 3 weeks of Hellfire training prior to the exercise from Rockwell Missile Systems International (RMSI). The goal of the exercises was to see if a standard infantry battalion could adequately operate and control the GLH-L under operational conditions, such as deploying them appropriately to engage enemy armor it might encounter.
The only modification from real to simulated operation was the substitution of the laser designator from the standard Ground Laser Designator (G.L.D.) to a lower power and eye-safe system to prevent injury to anyone who got lased. When live-missiles were used, however, the standard GLD was used, although the lock-on for the missiles was set at launch due to the range limitations at play.
Live-firing a Hellfire from the GLH-L M998 HMMWV platform during trials.
Source: Dell
Forty day and night trials were conducted with the two forces, with continual electronic monitoring for later review. Using the GLD for these live fire shoots, an advance team was able to lase the target and radio in for a missile launch, leading to 6 missiles being fired and hitting the target.
Mounted on the roof using a ‘GLH Adaptor Kit’, the vehicle carried 6 missiles in the back, with 2 mounted on the roof, for a total load of 8 missiles.
The Army was considering the idea of this system to equip elements of the 82nd Airborne Division but, once more, with no formal requirement and no production orders, the idea was only that – just an idea.
For heavier vehicles, ones with some built in ballistic protection from enemy fire and more suitable for conventional units, two vehicles were the obvious choice of launch platform for the Hellfire, the Bradley, and the ever-present M113. Operating as Fire Support Team Vehicles (FIST-V), the vehicles would be able to lase an enemy target and attack it directly if they wished, or once more use the remote targeting. This was the Ground Launched Hellfire – Heavy (GLH – H), part of the 16-month long GLH project. That work saw a turret put together and installed as a test on an M901 Improved TOW Vehicle (ITV) variant of the M113. The system was substantially larger than the 2-missile system on the M998, holding 8 missiles in two 4-missile pods on either side of the turret.
That system was also tested and found to be functional, but was not carried forward and received no orders for production.
M113 GLH-H seen during a test launch. Source: Hunnicut
Conclusion
The GLH-L, part of the GLH program, had been supported by the Army and by the Hellfire Project Office (HPO), which had accumulated the work of MICOM Weapons Systems Management Directorate (WSDM) in February 1990. HPO had then followed up on the Hellfire, as it was used in service and was being improved and refined. At the same time, Martin Marietta received a contract for development of the missile, known as the Hellfire Optimised Missile System (HOMS) in March 1990 and both had supported the work on GLH-L. However, in April 1991, HPO was redesignated as the Air-to-Ground Missile Systems (AGMS) Project Management Office, leaving no doubt that official interest seemed to have ended in ground-launched applications in favor of aircraft-launched systems. Indeed, this was just a few months after work on developing the Hellfire missile for the Longbow Apache helicopter had started.
By 1992, HOMS too was gone and its work was simply repurposed as ‘Hellfire II’, which was to finally take the form in the AGM-114K version of the missile. The GLH-H side of things, therefore, was also left out in the cold. There seemed little appetite for a ground launched version of a weapon which was already successful on aircraft and the development work specifically was to focus on airborne use as well.
In recent years however, renewed interest has been shown in a ground launched Hellfire version to replace TOW and upgrade the US military’s ability to strike enemy targets from even further away. In 2010, Boeing, for example, tested the ability of the Avenger turret air defence system to launch Hellfire missiles. This would allow the Hellfire once more to be mounted on light vehicles, like the HMMWV, but also on the LAV and other systems.
However, such systems seeing service seems unlikely, as the Hellfire missile and variants was, as of 2016, destined for replacement by a new missile known as the Joint Air to Ground Missile (J.A.G.M.) as a common missile across all platforms naval, air, and ground.
Pandur 6 x 6 launching a Hellfire missile.
Source: Designationsystems.net M998 GLH-L ‘Ground Launched Hellfire – Light’. Illustration by hansclaw.
Overview of Hellfire Missile Variants
Designation
Model
Year
Features
Hellfire
AGM-114 A, B, & C
1982 – <1992
8 kg shaped charge warhead,
Non programmable,
Semi-active laser homing,
Not effective against ERA,
45 kg / 1.63 m long
8 kg shaped charged tandem warhead,
Semi-active laser homing,
Effective against ERA,
45 kg / 1.63 m long
–
AGM-114 G
SAD equipped,
Not developed
AGM-114 H
Digital autopilot,
Not developed
Hellfire II
AGM-114 J
~ 1990 – 1992
9 kg shaped charge tandem warhead,
Semi-active laser homing,
Digital autopilot,
Electronic safety devices,
49 kg / 1.80 m long
Army model,
Not developed
AGM-114 K
1993+
Hardened vs countermeasures
AGM-114 K2
Added insensitive munitions
AGM-114 K2A
(AGM-114 K BF)
Added blast-fragmentation sleeve
Hellfire Longbow
AGM-114 L
1995 – 2005
9 kg shaped charge tandem warhead,
Millimeter wave radar (MMW) seeker,
49 kg / 1.80 m long
Hellfire Longbow II
AGM-114 M
1998 – 2010
Semi-active laser homing,
For use vs buildings and soft-skinned targets,
Modified SAD,
49 kg / 1.80 m long
Blast fragmentation warhead (BFWH)
Hellfire II (MAC)
AGM-114 N
2003 +
Metal-Augmented charge (MAC)*
Hellfire II (UAV)
AGM-114 P
2003 – 2012
Semi-active laser homing
Shaped charge or blast fragmentation warheads depending on model.
Designed for high altitude UAV use.
49 kg / 1.80 m long
Hellfire II
AGM-114 R
2010 +
Integrated blast fragmentation sleeve (IBFS),
Multi-platform use,
49 kg / 1.80 m long
AGM-114R9X
2010+?**
Inert warhead using mass and cutting blades for low-collateral damage removal of human targets
Note
Adapted from US Army Weapons Handbook guide to Hellfire via fas.org
* Sometimes referred to as a ‘thermobaric charge’.
** Classified development
Sources
Aberdeen Proving Ground. (1992). Ballisticians in War and Peace Volume III: A history of the United States Army Ballistic Research Laboratory 1977-1992. APG, Maryland, USA
AMCOM. Hellfire https://history.redstone.army.mil/miss-hellfire.html
Armada International. (1990). US Anti-Tank Missile Developments. Armada Internal February 1990.
Author’s notes from vehicle examination, June 2020 and July 2021
Dell, N. (1991). Laser-guided Hellfire Missile. United States Army Aviation Digest September/October 1991.
GAO. (2016). Defence Acquisitions. GAO-16-329SP
Lange, A. (1998). Getting the most from a lethal missile system. Armor Magazine January-February 1998.
Lockheed Martin. 17th June 2014. Lockheed Martin’s DAGR and Hellfire II missile score direct hits during ground-vehicle launch tests. Press Release https://news.lockheedmartin.com/2014-06-17-Lockheed-Martins-DAGR-And-HELLFIRE-II-Missiles-Score-Direct-Hits-During-Ground-Vehicle-Launch-Tests
Parsch, A. (2009). Directory of US Military Rockets and Missiles: AGM-114. http://www.designation-systems.net/dusrm/m-114.html
Roberts, D., & Capezzuto, R. (1998). Development, Test, and Integration of the AGM-114 Hellfire Missile System and FLIR/LASER on the H-60 Aircraft. Naval Air Systems Command, Maryland, USA
Thinkdefence.co.uk Vehicle Mounted Anti-Tank Missiles https://www.thinkdefence.co.uk/2014/07/vehicle-mounted-anti-tank-missiles/
Transue, J., & Hansult, C. (1990). The Balanced Technology Initiative, Annual Report to Congress. BTI, Virginia, USA
United States Army. (2012). Hellfire family of missiles. Weapon Systems 2012. Via https://fas.org/man/dod-101/sys/land/wsh2012/132.pdf
United States Army. (1980). The United States Army Logistics Center Historical Summary 1st October 1978 to 30th September 1979. US Army Logistics Center, Fort Lee, Virginia, USA
United States Department of Defense. (1987). Department of Defence Appropriations for 1988.
The GLH-H based on the M901, illustrated by Ardhya 'Vesp' Anargha, funded by our Patreon campaign.
United States of America (1990-1991)
Missile Tank Destroyer – 1 Built
The AGM-114 ‘Hellfire’ missile was developed by the US Army specifically to counter modern Soviet main battle tanks in a potential clash of superpowers. Thankfully for all concerned, such a conflict did not erupt, the Cold War ending with the collapse of the Soviet Union. Nonetheless, the missile in service proved itself effective in combat and offered advantages over the TOW (Tube-launched Optically-tracked, Wire-guided) missile. The idea of a ground-launched version of the missile goes back to around 1980, even before the missile had been finished. It was not until 1991 that efforts were seriously made to use it within a project called Hellfire Ground Launched (HGL) coming in two types; Light (GLH-L) – mounted on an HMMWV, and Heavy (GLH-H) – mounted on a light armored vehicle such as the Bradley, LAV, or M113. It came to pass that only one of those options was pursued, the test mounting and fitting of the GLH-H turret on an M113, in this case, a repurposed M901 TOW version of the M113.
Background
The Hellfire missile is a third-generation anti-tank missile capable of both air launch (originally from the Advanced Attack Helicopter program by Hughes Aircraft Company) but also from the ground, in a line of development dating back to the late 1960s with the LASAM (LAser Semi-Active Missile) and MISTIC (MIssile System Target Illuminator Controlled) programs. By 1969, MYSTIC, the over-the-horizon laser missile program, had transitioned into a new program known as the ‘Heliborne Laser Fire and Forget Missile’, shortly thereafter renamed ‘Heliborne Launched Fire and Forget Missile’, later shortened to just ‘Hellfire’.
By 1973, the Hellfire was already being offered for procurement by Rockwell International based in Columbus, Ohio, and to be manufactured by Martin Marietta Corporation as the ‘HELLFIRE’, but somewhat misleadingly still being considered or labeled by some as a ‘fire and forget’ type of weapon. It was not until the arrival of Hellfire Longbow that a true fire-and-forget version of the Hellfire existed.
Procurement and limited manufacturing of the missile followed, with the first test firings of the finished product, known as the YAGM-114A, at Redstone Arsenal in September 1978. This was followed by modifications to the infrared seeker of the missile. With Army trials completed in 1981, full-scale production began in early 1982, with the first units fielded by the US Army in Europe at the end of 1984.
Targeting
Despite being occasionally mislabelled as a fire and forget missile, the Hellfire can in fact be used quite differently. Fire and forget implies that, once the weapon is locked onto a target, it could be fired and then the launch vehicle could retreat to a safe distance or move on to the next target. This is not strictly a correct description of the Hellfire, as the missile also has the ability to have its trajectory changed during flight by up to 20 degrees from the original and up to 1,000 m each way.
Targeting for the missile is by means of a laser which is projected from a designator either in the air or on the ground, regardless of where the missile is launched. An air-launched Hellfire can, for example, be targeted onto an enemy vehicle by a ground designation laser or by other designating aircraft. The missile is not limited to ground targets either. It can also be used to target aircraft, with some emphasis on its ability to counter enemy attack helicopters. Thus, the missile gains a substantial survivability bonus for a launch vehicle, as it does not have to remain in situ and can even be fired from over the horizon, such as over a hill at targets beyond.
The TOW missile was already available in the US arsenal, but Hellfire offered some things that TOW did not. For example, an increased standoff capacity along with an increased range (over the 3 to 3.75 km maximum range of TOW), an increased versatility of use, as the TOW was not suitable for aircraft use, as well as improved physical performance, such as armor penetration, explosive blast, and a shorter flight time due to traveling more quickly.
With a continuous laser seeker on the missile following the designation applied, the missile could easily target moving vehicles whilst being harder to intercept or counter (by engaging the launcher).
Improvements in ballistics through the 1980s improved the Hellfire design and the weapon has a maximum effective range quoted as being up to 8 km, with longer ranges being achieved with a reduction in accuracy due mainly to attenuation of the laser beam. Data from the Department of Defense, however, provides a maximum direct fire range of 7 km, with indirect fire out to 8 km, with a minimum engagement range of 500 m.
The Hellfire missile was first used in anger during the Invasion of Panama in December 1989, with 7 missiles being fired, all of which hit their targets.
Basic layout of the Hellfire missile family, showing the 4 main sections. Source: fas.orgCutaway view of Hellfire II missile. Source: Defenceindustrydaily.com
Ground Launched Hellfire – Light (GLH-L)
The initial deployment of Hellfire in the ground role was considered to support the capabilities of the US 9th Infantry Division in 1987. By 1991, this idea of using Hellfires to support that unit had grown closer and it was decided that the M998 HMMWV would become the mount for the system. Interest was later shown by the Army in potentially deploying this system to the 82nd Airborne Division as well.
Using off-the-shelf components, and with a potential customer in the form of the Swedish military, who wanted a coastal defence missile, the Ground Launched Hellfire – Light (GLH-L) received a budget and went ahead. Five such vehicles were created. During trials in California in 1991, the system showed itself to be a success in firing trials. Despite this, the system was not adopted by the US military.
GLH-L M998 HMMWV during Hellfire firing trials. Source: AMCOM
Ground Launched Hellfire – Heavy (GLH-H)
For heavier vehicles, ones with some built-in ballistic protection from enemy fire, three vehicles were the obvious choice of launch platform for the Hellfire, the Bradley, the LAV, and the ever-present M113. Operating as Fire Support Team Vehicles (FIST-V), the vehicles would be able to lase an enemy target and attack it directly if they wished, or once more use remote targeting. This was the Ground Launched Hellfire – Heavy (GLH – H) part of the 16-month-long GLH project.
It is unclear if a test was even carried out on a Bradley, but one was certainly done on an M113. This involved little modification of the vehicle itself except that it had to have a turret fitted to take the missiles and electronics involved. To this end, the M113 under the system was almost inconsequential to the vehicle, as it was little more than a test bed to haul the turret around. A large circle was cut out of the roof armor to take the new system. Conversion work was undertaken by the Electronics and Space Corporation (ESCO), including the fitting of the turret and installation of the laser equipment.
The ring in the roof does not appear to even have an adequate lock or means by which to prevent it from easily rotating under its own weight. The vehicle, currently on display in a museum in Nebraska, has the turret held in place with wire cables to prevent damage and rotation, suggesting the original gearing or control mechanism from the vehicle have been removed. This is because the donor M113 selected for the trials was an M901 Improved TOW Vehicle (ITV).
The M113 / M901 version modified to take the GLH-H turret. Source: Author
M901 ITV
The M901 ITV, introduced in 1978, differed from the M113 in that, instead of just being an armored box for infantry transport, it was an armored box with a roof-mounted missile system.
The basic M901 mounted the M22A1 TOW, followed by the M901A1 with the M220A2 TOW 2 missiles. The final option, the M901A3, carried the same TOW2 missiles and launcher as the A1 model, but had vehicular improvements, such as improved driver controls and RISE powerpack.
Carrying a dual M220 TOW launcher, the M901 had a crew of 4, consisting of a driver, a gunner, a commander, and a loader. This made sense for a vehicle where the missiles could be reloaded from inside, but less so for the GLH-L and GLH-H, on which reloading had to take place outside.
M901 ITV. This was a dual M220 TOW missile launcher on an M113. Source: Hunnicut
Turret Structure
The Hellfire turret consisted of 4 primary parts: the basket lying underneath the turret and inside the body of the M113, the manned section of the turret, the guidance system at the front, and the rocket pods themselves.
At the back of the turret were a pair of hatches with vision blocks around them. Ahead of the left sight which was mounted on the roof and fixed in place, was the designator offset on the turret front, where a pair of angular protrusions covering the front of the turret face and a pair of thickly made boxes on each side. Each box appears to have been detachable by a series of bolts on the sides and top. These housed the rotating mount for each pod.
View of the turret roof showing the hatches at the back and fixed roof sight. The thickly made boxes are visible both from the front (left) and rear (right).
Source: Author
The body of the turret was approximately 8 mm thick aluminum all round. At the front, on each side, appear to be a pair of large armored boxes, approximately 35 mm thick on the sides and roof. The actual thickness of the roof cannot be measured as is, but the mounting plate for the gunner’s sight is 16 mm thick and sits on an additional plate on the roof with approximately the same thickness.
The hatches at the back are mounted on steel springs but have an aluminum body 40 mm thick. They have a thin steel covering bolted to the top of the hatch. The purpose of this construction is unclear.
The hatch on the left is fitted with 4 simple episcopes, although only the one facing 45 degrees to the rear left would be of much use. No sight is provided forwards for the gunner except for the large roof sight. The episcope facing left is completely obscured by the left-hand missile pod and the one to the right is blocked by the other hatch. The one fitted to the rear right, looking 45 degrees backward, is also blocked, this time by a small metal box in the center of the rear of the turret roof, the purpose of which is unknown.
If the crew member using the left hatch is poorly served by optics, then the one on the right is even more so, as they only had provision for 2 episcopes and these are half the size of the ones on the other hatch. Both are positioned facing forwards at 45 degrees, meaning no direct view forwards from that position and neither is of any use. The one on the right simply faces directly into the right hand missile pod and the one on the left would be completely blocked by the large roof-mounted sight, or would be if it had not been removed and welded over. Thus, of the 6 ‘normal’ episcopes on the turret for the crew, one is missing, three are completely or almost completely blocked by other turret features and none of them look forward.
Looking down on the turret hatches. Hunnicutt identified these are the commander’s hatch on the right and gunner’s hatch on the left.
Source: Author.
Looking forward over the turret, its relatively simple nature is clear along with the offset sight box projecting from the front. The poor position of the vision blocks is readily apparent. Source: Author
Guidance System
The turret is asymmetrical, with the guidance module offset to the left at the front. It consists of a pronounced armored box on a mantlet, allowing the laser designator to be fitted. The author R. P. Hunnicutt states that both the US Army ground locator designator (G.L.L.D.) and US Marine Corps Modular Universal Laser Equipment (M.U.L.E.) were fitted.
The box housing it, like the rest of the turret (apart from the mantlet), is made from aluminium, with a front panel 9 mm thick, which houses the lens over the laser designator. The back of the box is 11 mm thick and then mounted to the steel rotating mantlet, which is approximately 50 mm thick. The aluminium framing on either side of this area is 20 mm thick on the right side and 32 mm thick on the left side. The reason for this difference is unclear.
The amount of rotation available for the guidance box on the mantlet is unclear, as there is a metal bolted to that rotating part which would foul on the top edge, where it meets the turret roof, at a relatively modest angle of around 30 degrees or so. It appears that this module would be severely limited in the ability of targeting aircraft, such as helicopters, but this was just a test bed, so what modifications would have been made to allow for a broad spectrum of possible targets is unknown.
Looking down on the guidance system box at the front. Source: AuthorThe turret front is well angled and neat, showing just the single lens for the laser guidance system. Source: Author
Armament
Absolutely no secondary armament of any kind is apparent on the vehicle, either on the hull or on the turret. It is likely that, should such a turret ever have seen production, some kind of weapon mount would have been added in the form of a roof machine gun. Even then, however, with those huge pods blocking both sides, the coverage of such a weapon would be extremely limited. The vehicle is thus rather vulnerable to any enemy nearby. The only provision for self-defense are the smoke dischargers, which consist of a single 3-pot mounting on the front right corner of the turret and the dischagers on the hull (2 four-pot discharges on the front corners). Hunnicutt states that a single machine gun was fitted for close-in protection, but this is not shown in any photograph and no mounting for it is apparent either.
Smoke grenade dischargers on the front right of the turret. Source: Author
The Pods
As mounted on the M113, the Hellfire system took the basic form of a pair of 4-missile pods on either side of a turret. Each pod was divided into 4 chambers, each measuring 335 mm wide by 335 mm high internally and made from aluminum supported with ribs 7 mm thick. The internal structure of the pods is heavy, with a central vertical divider and floor plate approximately 40 mm thick. Holes in the front and back of the pods indicate that, at some point, covers were also fitted to these pods and one can be seen in a photo of the system during trials.
The heavy construction of the rocket pods is apparent in this image, as is the height from the ground for reloading. While the pods are hinged they are held on the inner side by just two bolts. Also note the holes in the rear face of the pod for a cover that is missing from both ends of both pods. Source: Author
Each pod was fitted with what appears to be a hinged lid, but closer inspection shows these hinges are on both sides of the top, precluding some sort of vertical reloading. Reloading, in fact, seems to only have been possible from either in front or behind the pod. Given the height of the turret above the ground, reloading would entail standing on the hull roof with the turret partially rotated.
Each pod can clearly rotate from at least horizontal, but the upper limit is unknown. Photographic evidence from launches show an angle less than 45 degrees and also that each pod could be rotated independently.
Missile pod on the side of the M113 GLH-H turret. Source: AuthorRight-hand missile pod seen from the turret roof. The reinforcing ribs stiffen the launch boxes but also serve to trap water. Source: AuthorM113 GLH-H seen during a test launch. Source: HunnicutM113 GLH-H during a test launch. Note that there is clearly a cover over the back of the right missile pod. Source: Pinterest
Eight Hellfire missiles could be carried ready for action on the GLH-H, compared to just 2 on the GLH-L. It is likely that additional stowage inside the back of the GLH-H mount, whether on the Bradley, LAV, or M113, would also have been installed to carry more missiles. For reference, the M901 had space for an additional rack of missiles. The same would likely have been true of any fielded GLH-H system as well.
Basket
Inside the vehicle, the driver’s station was just as it was on the M901. However, the area under the turret was quite different. The turret descended into the hull using a riveted cylindrical aluminum basket, with a motor or gearing mounted in the center of the floor. On each side of this were the two crew positions. Whilst a space was retained between this cylinder and the rear access door, in which a fourth crewmember might be located with additional missiles, there is no space on either side of the cylinder around which passage can be obtained. Through-access from front to rear on the vehicle is therefore limited to passage through the large gaps in the cylindrical basket and, with two crew in there, this would not be possible. In its current state, in 2020/2021, there is no safe access within the vehicle.
Looking backward inside the vehicle from the driver’s seat. The lack of access on either side of the cylindrical turret basket is readily apparent, as is the open nature of the basket itself. Source: Author
Conclusion
GLH-H appears to have been a bit of an orphan program. The GLH-L had been supported by the Army and by the Hellfire Project Office (HPO), which had accumulated the work of MICOM Weapons Systems Management Directorate (WSDM) in February 1990. HPO had then followed up on the Hellfire, as it was used in service and was being improved and refined. At the same time, Martin Marietta received a contract for the development of the missile known as the Hellfire Optimised Missile System (HOMS) in March 1990 and both had supported the work on GLH-L. However, in April 1991, HPO was redesignated as the Air-to-Ground Missile Systems (AGMS) Project Management Office, leaving no doubt that official interest seemed to have ended in ground-launched applications in favor of aircraft-launched systems. Indeed, this was just a few months after work on developing the Hellfire missile for the Longbow Apache helicopter had started.
By 1992, HOMS too was gone and its work was simply repurposed as ‘Hellfire II’, which was to finally take the form of the AGM-114K version of the missile. The GLH-H side of things, therefore, was left out in the cold. There seemed little appetite for a ground-launched version of a weapon that was already successful on aircraft and the development work specifically was to focus on airborne use as well.
What did the GLH-H offer that a vehicle like the M901 ITV did not? On a one-to-one comparison scale, both vehicles had pros and cons, although the substantially larger missile load on the GLH-H and the longer range of the Hellfire missile were perhaps the most obvious. The system was, however, unproven. The TOW system had already been in ground use since the early 1970s and was combat-proven, as well as being substantially cheaper on a missile-to-missile basis. Having a maximum engagement range of 7 km instead of just over 3 km was certainly no small deal and it was not argued that the Hellfire was in any way inferior to the TOW. The issue was perhaps more of a practical one. The TOW was already in widespread use and proven and the GLH-H was not. If the enemy were further away, then they were by definition a lesser threat anyway and could be engaged by other means, such as air-launched Hellfires. The GLH-H system was also huge. Those missile pods were vulnerable to damage from enemy action or environmental or terrain factors and there was no way of reloading them safely from within a vehicle such as the M113, as there was with the M901, meaning the crews would have to be exposed. The Bradley, on the other hand, had a large hatch over the roof at the back, which might have allowed for some limited protection for reloading.
More than the design issues of the GLH-H launcher and compatible mounting, the development of GLH simply came too late. Despite being considered as far back as 1980, no work was really done for over a decade, by which time the TOW was even more widely deployed than before and there were other new missiles for infantry use available. If GLH was ever going to get actively developed, it might have been then, during the peak of the Soviet threat in Western Europe, when large numbers of Soviet tanks were expected to be encountered and a new missile system could have added much-needed firepower. With the collapse of the Soviet Union in 1990 and existing anti-tank measures being proven in combat in the Gulf War of 1990-1991, it was not clear why a new system would even be needed, whether on a light or heavy platform.
After all, if the need for a better-protected platform with missiles was essential, there was no reason not to just mount the M220 TOW system onto a Bradley anyway, although what this would add when mounting a pair of TOW missiles on a Bradley was standard is even less clear and really just reinforces the point of this being a project without a true purpose.
It was all academic by the early 1990s, the M901 series was being removed anyway, the Bradley already carried a pair of TOW missiles on the side, meeting the same level of firepower, and two systems to do the same thing, with one substantially more capable as a basic vehicle than the other made no sense. The only logical outcome for a GLH-H to have met a ‘need’ would have been Bradley based rather than on an M113, but this step was not taken and would not have fundamentally changed the viability of the project other than creating a very identifiable variant of the Bradley on the battlefield. With control of the development of the whole project handed over to an aircraft-focussed approach, the project with unclear objectives and needs was destined for failure.
The M113 / M901 converted with this GLH-H 8-missile launcher resides today at the Historic Museum of Military Vehicles in Lexington, Nebraska. The author wishes to express his gratitude to the staff there for their assistance.
Ground-Launched Hellfire Redux?
In recent years, however, renewed interest has been shown in a ground-launched Hellfire version to replace TOW and upgrade the US military’s ability to strike enemy targets from even further away. In 2010, Boeing tested the ability of the Avenger turret air defense system to launch Hellfire missiles. This would allow the Hellfire once more to be mounted on light vehicles like a HMMWV, but also on the LAV and other systems.
The Hellfire missile has also already been mounted in the ground role on the Pandur 6 x 6, with the Multi-Mission Launcher (MML), on the Family of Medium Tactical Vehicles (FMTV) truck and in Lockheed Martin’s Long Range Surveillance and Attack Vehicle (LRSAV) based on the Patria AMV firing the Hellfire II in 2014. However, such systems seeing service seems unlikely, as the Hellfire missile and variants are, as of 2016, destined for replacement by a new missile known as the Joint Air to Ground Missile (J.A.G.M.), meant as a common missile across all platforms, naval, air, and ground-based.
Pandur 6 x 6 launching a Hellfire missile. Source: Designationsystems.netThe GLH-H based on the M901, illustrated by Ardhya ‘Vesp’ Anargha, funded by our Patreon campaign.
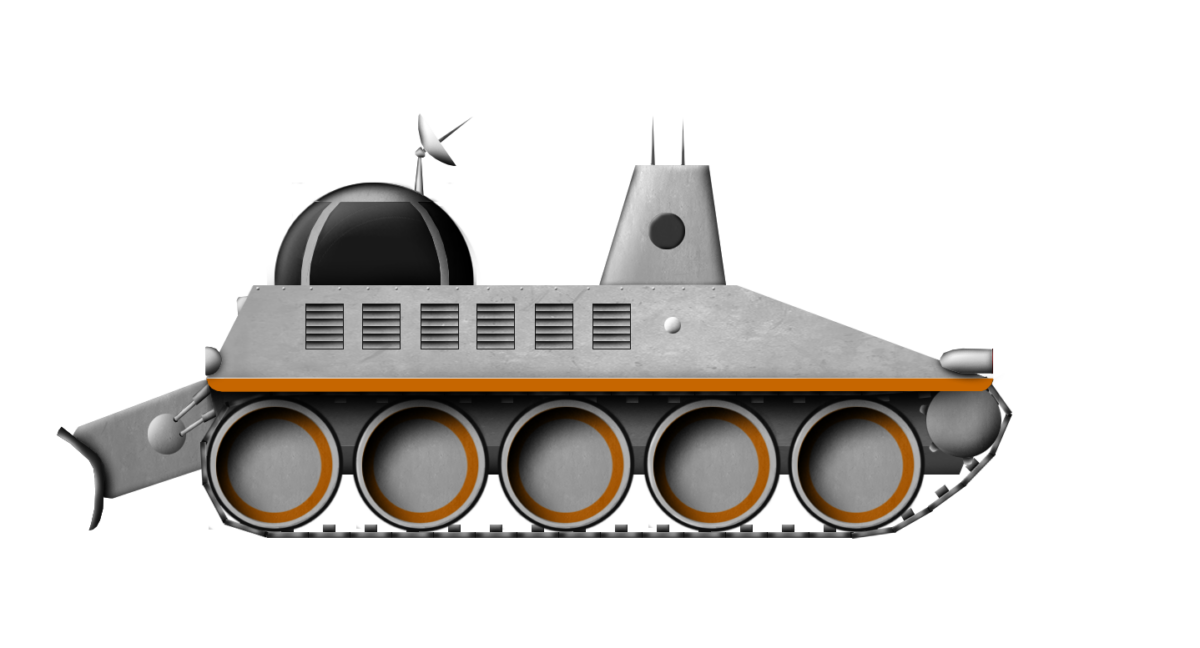
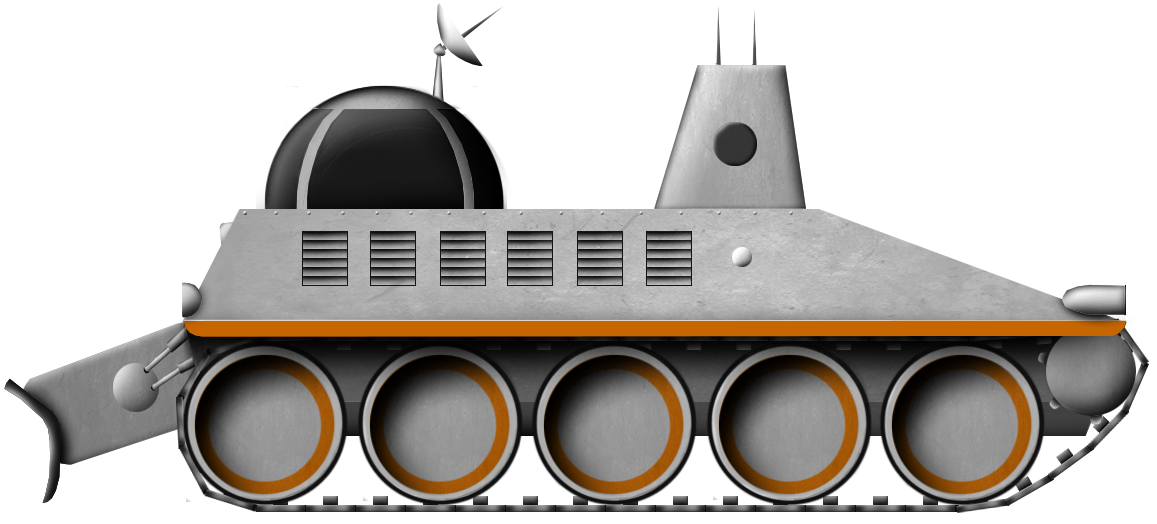
A small 1.2 ton construction vehicle meant for the lunar surface. It would have been useful not only for constructing the base, but also for constructing defensive positions. Illustration by Pavel 'Carpaticus' Alexe, funded by our Patreon campaign.
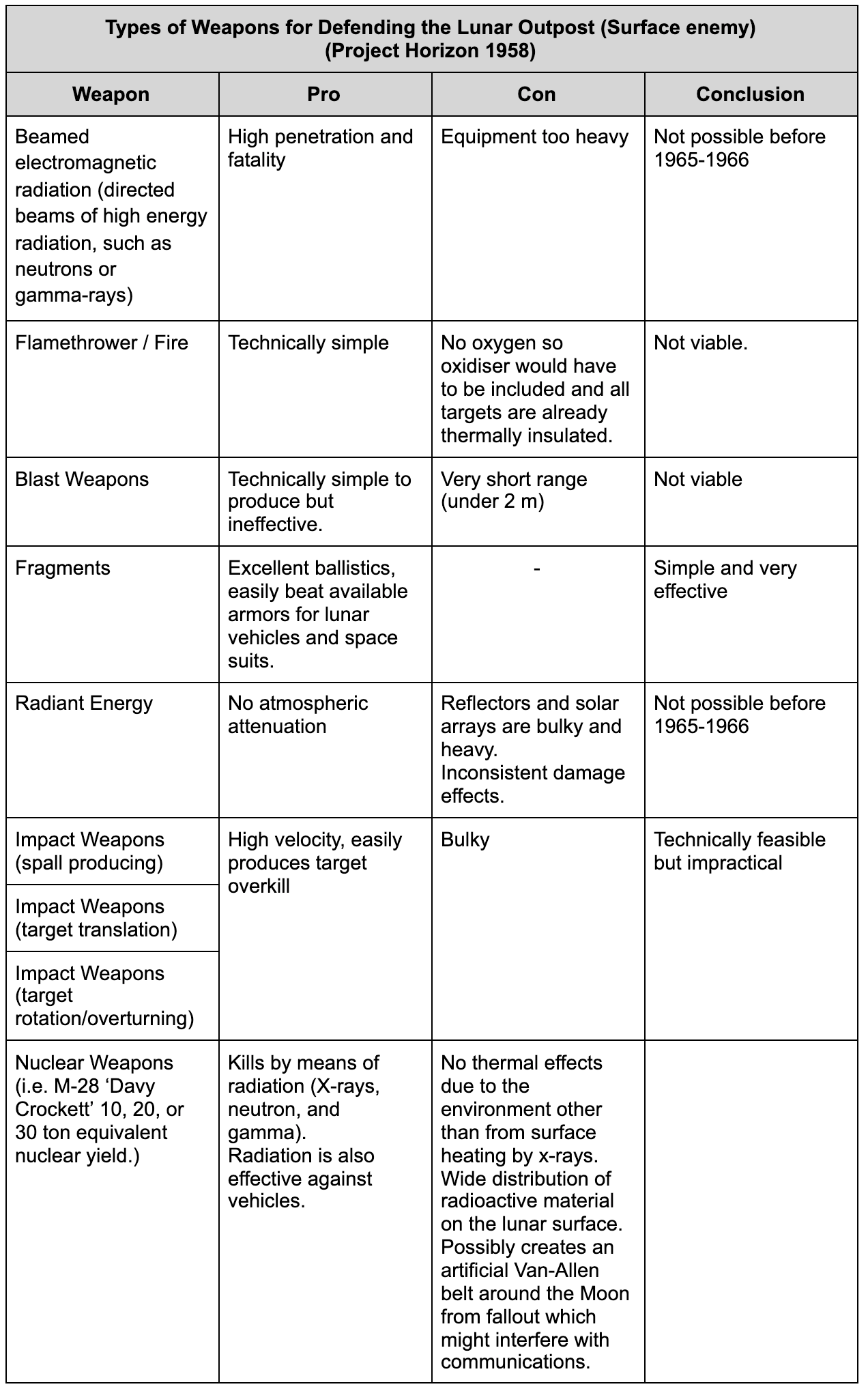
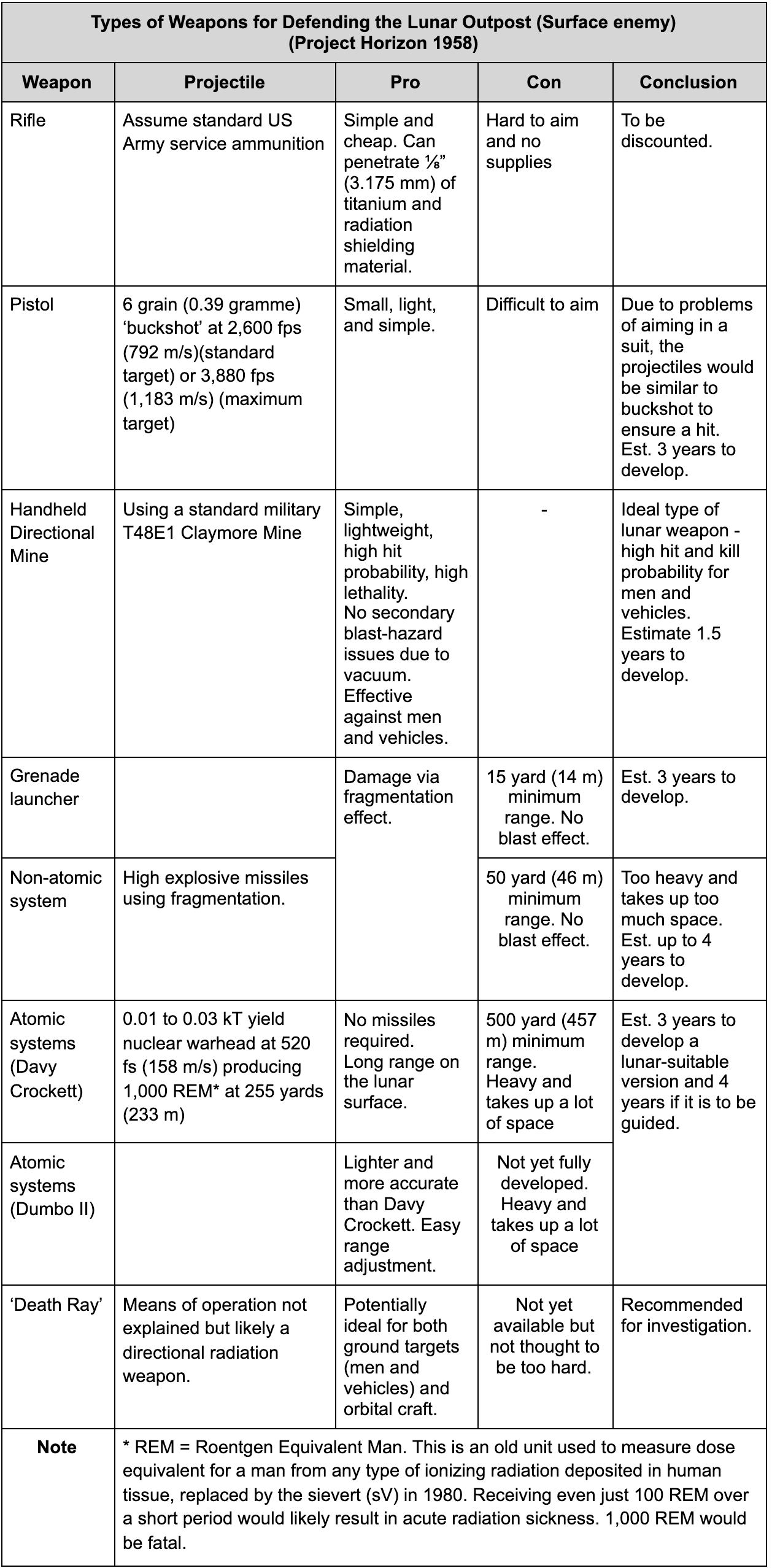
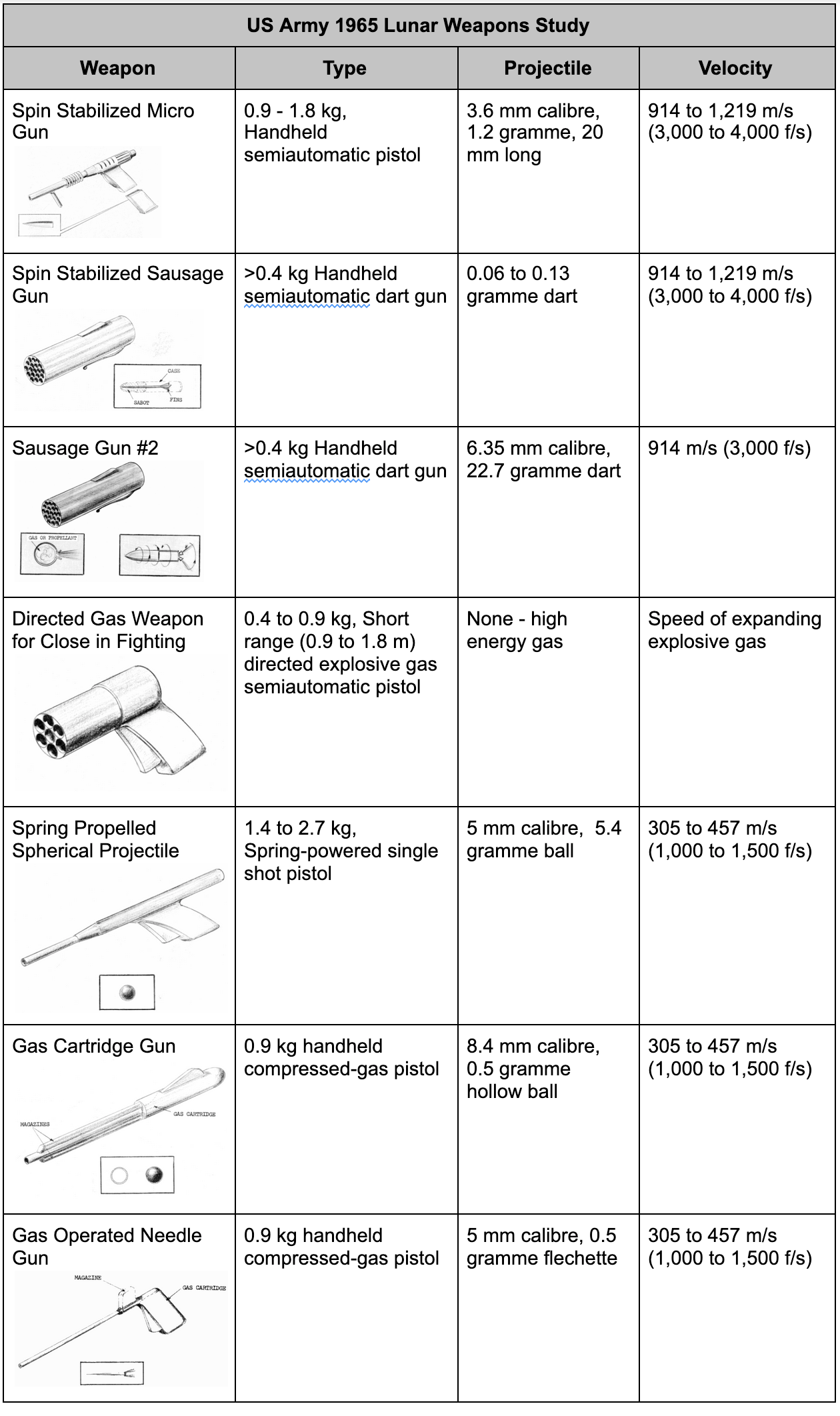
United States of America (1958-1967)
Lunar Vehicle Concepts – None Built
Source: US Army Future Weapons Office
Following the defeat of Germany in 1945, the two former allies and ‘superpowers’, the United States and the Soviet Union, began a decades-long confrontation and global competition which became known as the Cold War.
The United States, assisted by its allies, such as Great Britain, had developed a functional nuclear weapon in 1945, and was followed by the Soviet Union in 1949 (post-war, the USA refused to share this technology with the UK, which developed its own nuclear device in 1952).
A year later, in 1950, the newly formed United Nations went to war in Korea with the Chinese and Soviet-backed North Korean forces in a 3-year long conflict which could have escalated into the use of nuclear weapons.
It was clear to the US military that, whilst conventional forces may face off against each other, nuclear weapons may also come to dominate the battlefields of the 1960s and beyond, and also that, in the larger geopolitical rivalry with the Soviet Union, any edge may be decisive.
When, at the end of July 1955, the United States announced its intention to launch artificial satellites into orbit around the Earth, the Soviets saw this as a challenge to their own security. They then began their own space program, culminating in the launch of Sputnik I and II in October-November 1957, the world’s first artificial satellite and the start of what became known as the Space Race. This was a race not just to show some technical superiority over a rival power, but also had the potential to yield dominance of the fourth realm of warfare – space.
Dominance of space would mean control over enemy surveillance satellites, the ability to spy on anyone, anywhere, and also to mount weapons beyond the ability of an enemy to counter strike, but also meant some kind of base would be needed.
This would be a base not in the form of a giant man-made space station orbiting the Earth, but on the greatest natural satellite – the Moon itself. This was made official as a request in early 1958, when the US Secretary of Defense, Neil McElroy, ordered the Advanced Research Projects Agency (ARPA) to take “a close look at the moon”. This was followed on 2nd April 1958 by President Eisenhower declaring the need for establishing a single unified national space agency (the National Aerospace and Space Administration – NASA, was formed on 1st October 1958).
“Last year (1958), Air Force General Homer A. Boushey,… stated that a lunar military base someday will be vital to national security, that in one sense the Moon represents the age-old military advantage of [‘high ground.’] He is one of the many uniformed American leaders seriously thinking in terms of the military relation of outer space to the Earth and human events thereon. While there is perhaps no unified agreement in American military circles on the concept that ‘he who controls the Moon controls the Earth,’ nevertheless, there is well-grounded agreement that vital military keys to our future national defense lie in outer space.”
LTC Robert B Rigg, US Army, 1959
The Project Horizon Moonbase dug into the lunar surface, ‘Late 1965’. Source: US Army
The Moon, Earth’s nearest neighbor, measures some 3,476 km in diameter (equatorial) and orbits the Earth at a distance of between 356,400 km (perigee) to 406,700 (apogee) at an average speed of 1,022 km/s. With a mass of 7.342 x 1022 kg, just 1.2% of the mass of the Earth, it has a surface gravity of just 1.62 m/s2, just 16.5% of Earth’s gravity. The Moon has no functional atmosphere. There are gases to be found on the surface, but the density of molecules is so low as to technically form an exosphere. Whilst minute levels of oxygen, amongst other gases, have been found, the quantities that are so minute as to be of little or no use – certainly not enough for a person to breath or vehicle engine to use.
No atmosphere also means no filtering of the solar and cosmic radiation, with charged particles being attracted to the exterior of any suit or vehicle as a result of the lunar surface being well insulated, building up a charge on anything moving across it. Men or vehicles returning to a base would have to be ‘earthed’ (grounded) to remove this charge – yet another problem to overcome.
If these conditions are not harsh enough, the temperatures range from -130° C to 120° C at the equator and are even colder at the poles. The temperature variation in a small locale can be severe too. The Moon moves around the Earth at just 0.5° per second, meaning not only that days and nights are two-week-long, but also that the area in daylight from the Sun lying next to an area shaded may only be a few centimeters away from each other, but could be over a hundred degrees different in temperature.
The surface is heavily pitted with craters from asteroid and meteorite impacts that struck the crust of the Moon over billions of years. Those impacts led to the surface being covered with a fine dusty material called regolith, which can range in depth from as little as 3 meters deep to around 20 meters deep in places with numerous rocky outcrops. The surface is a difficult and barren zone and any vehicles conducting operations, or any men on the surface, would have to be able to both navigate, survive, and even fight in these conditions – no small feat. Navigation both on foot or by vehicle is, for example, complicated by the fact that the magnetic field is too weak for an effective compass to work (less than 200 nT [nanotesla] compared to Earth’s 22,000 to 67,000 nT) and that a man 1.82 m (6’) tall can see only 2 miles (3.2 km) at best and more usually just 1.5 miles (2.4 km) and could easily become disoriented and lost. Further, the lack of an atmosphere means that radio signals can not be bounced down over the horizon, so radio communication is limited to line of sight only. With this high vacuum, metals in contact with each other can weld themselves together and yet lubrication is complicated by the lubricants boiling off. Any metals should therefore have to consider solid lubricants (which do not sublimate), special surface anti-friction coatings and/or only be in contact with non-metals.
Unusual conditions required unusual vehicles and Project Horizon certainly had its share of them and this would require some careful planning.
It has also to be borne in mind that in 1959, the exact surface conditions on the Moon were unknown to the extent that a plan in 1959 called for detonating a 500 kiloton nuclear weapon on the surface to analyze the material thrown up and the seismic effects resulting from the blast. Thankfully, the idea of nuking the Moon for science was not carried out and the first actual lunar samples would, in fact, not come back to Earth until 1969 and 1970 with Apollo 11 (USA) and Luna-16 (USSR) respectively.
The most probable site identified was the Sinus Aestruum (Latin: ‘Bay of Seething Heat’) near the Sinus Medii (Latin: ‘Middle Bay’) (center of the map to the right of the Copernicus crater). From a 1:5,000,000 scale labeled Mercator-projection relief map ‘Lunar Earthside Chart LMP-1’ October 1970 of the Moon 50 deg. N/S. & 100 deg. W/E. Source: Lunar and Planetary Institute https://www.lpi.usra.edu/resources/mapcatalog/LMP/ via US Air Force Aeronautical Chart Information Centre
Planning
Planning for a base of operations on the Moon would start in the first half of 1959 without physical samples of the lunar surface, but with an idea of the conditions based on scientific observation instead. Work on the project began with a feasibility study (Phase I), followed by a detailed development plan including how much it would cost (Phase II) through the rest of 1959 and the first months of 1960. All of the necessary development of technology and hardware needed would begin in 1960 (Phase III) with 4 years of solid work up to the start of lunar base construction in mid-1964. Phase III was to continue through to 1967, with the lunar base construction (Phase IV) finished by the end of 1966 and online (Phase V) by the end of 1967. The final phase, Phase VI, would then follow as capabilities for operations were progressively improved and expanded. All told, it was estimated to take nearly 10 years to have this base fully operational and, by that time (end of 1967), the base would be housing nearly 300 personnel.
The planning for Project Horizon fell to Lt. General Arthur Trudeau, who, at the time, was the Chief of Research and Development. He ordered the Chief of Army Ordnance to draw up the details in a 90-day planning exercise. The experts for this project worked for an agency known as ABMA – the Army Ballistic Missile Agency, and were led by none other than Dr. Wernher von Braun (23/3/1912 – 16/6/1977). Just as Trudeau tasked the Chief of Army Ordnance, who tasked Dr. Braun, Dr. Braun passed the task to Heinz-Hermann Koelle (22/7/1925 – 20/2/2011) as project lead, who brought in Dr. Georg Heinrich Patrick Baron von Tiesenhausen (18/5/1914 – 4/6/2018). Tiesenhausen had been an employee in the German missile program at Peenemünde (from April 1943) during WW2, where he had been a Section Chief in charge of ground support equipment and designed Pruefstand XII for the exhaust deflection system for the Schwimmweste [Eng: ‘life vest’] project (submarine-launched V2 rockets for targeting the USA) and had worked alongside Koelle, Braun, and others. He had not, however, been brought to the USA until 1953. Subsequent to the end of the war in 1945 and prior to being gathered up as part of Operation Paperclip, the Latvian-born scientist had been running a tank collection park for the British and working at a ship winch fabricator. The Project Horizon work was also to bring in every conceivable specialist at some point to have their say or express their views on the potential task at hand. This was an enormous project, despite the very narrow window in which to do it – certainly more than a simple paper exercise in lateral thinking, but a serious discussion over the challenges ahead.
Dr. Wernher von Braun (left) and Heinz-Hermann Koelle (right). Source: NASA via Air and Space MagazineDr. Georg H.P. Baron von Tiesenhausen, the brains behind the lunar mobility program for NASA. Source: Huntsville Times via the Tiesenhausen family.
Lt. Gen. Trudeau kicked off the planning work in March 1959 and, by 8th June that year, the report was done and published as ‘Project Horizon: A U.S. Army Study for the Establishment of a Lunar Military Outpost’ – a plan costing US$6 bn. to US$7.7 bn. For reference, US$$6 bn. and US$7.7 bn. in 1959 dollars would be the equivalent of US$53.4 bn. to US$68.8 bn. in 2020 values. Whilst this is a huge sum of money, it is still less than the current US defence budget for 2020, which is US$686 bn., and the costs were going to be spread over a decade. It accounted for just under 1% of the total budget, not to mention this would be money spent by the government within the US on rockets and salaries, etcetera. Maintenance of a lunar base was estimated in 1960 as an immodest US$631m per annum, equivalent to US$5.5 bn. in 2020 dollars – still under 1% of the US annual defense budget. The 1960 viability report by the US Air Force (also considering their own lunar base) on a permanent lunar military outpost pointed out that its total 10-year cost was equivalent to the annual operating costs of the US Farm Subsidy Program; in other words, it was expensive but affordable.
Lt. General Arthur Trudeau, US Army Chief of Research and Development 1958-1962. Source: ArmyHistory.org
The Project Horizon report would be the outline for how a base could be set up as a critical lunar system, for which a later decision would be taken on exactly how to militarise it and what for. The ability to conduct observations from a fixed platform onto the Earth was obviously valuable, but a base would go further than that, as can be inferred from the ominously titled 1959 report on the base plans “Lunar Based Earth Bombardment System” which could, according to a 1960 report, deliver weapons to Earth with an accuracy of 2 to 5 nautical miles (3.7 to 9.3 km), clearly indicating that nuclear weapons were going to be the weapons of choice.
Getting men, machines, and equipment there, setting up a base, and then protecting it from a potential adversary meant creating a supply system and potential weapons systems. All of this had to be integrated together and work in synergy due to the distance from potential help or resupply. Thus, all of the problems of such an outpost have to be considered together to understand the decisions made.
Getting There
The task of bringing all of the tools, equipment, and men to the Moon was to take 229 flights over a four-year period using the Saturn I and Saturn II rockets. Just getting men into Earth orbit would take 16 flights of the Saturn I and 6 of the Saturn II, with an additional 47 and 71 flights respectively to get the cargo into space. As well as the 300 personnel to be ferried back and forth between the Earth and Moon, using a clever rotation schedule to establish a 12-man outpost, approximately 245 tons of equipment and building materials had to be delivered to the Moon. This does not include the sustaining cost of maintaining the base either. A total of 61 Saturn I and 88 Saturn II launches would be needed over a 28 month period (a rate of 5.3 per month) to get set up, with 64 more to supply the base in year 1 – more than 1 per week. Later, larger and more efficient rockets, including ones propelled by nuclear detonation (predicted to be available from about 1970) would reduce the logistic burden of supplying the base. Bases for launching the Project were planned for either Brazil or Christmas Island, as locations near the equator were desirable.
“to be second to the Soviet Union in establishing an outpost on the Moon would be disastrous to our nation’s prestige and in turn to our democratic philosophy.”
Project Horizon, June 1959
The Base
Buried into the lunar surface, the base would be partially protected from damage by solar radiation and falling meteoroids. It would be built from a series of tubes connected together in much the same manner as many nuclear shelters on Earth, forming functional modules in which work would be conducted. The primary difference would be the source of power, and for this, it was planned to use nuclear reactors to provide sufficient electrical power for all of the heating, lighting, and equipment. An initial 5 kW nuclear reactor would be landed to provide power for the construction camp, followed by a 10 kW unit and a 40 kW nuclear unit for the construction of the rest of the facility. At that time, the 5 kW reactor would be dedicated to just powering the life-support. Lacking radiation shielding (to save weight), these would be placed into craters blasted out from the lunar surface if natural ones could not be found, and then covered with lunar soil to a depth of 12 feet (3.7 m). For normal operations, all power was to come from the 40 kW reactor, with the 10 kW unit held for emergency backup use. Despite the extreme cold in places, spare heat would still have to be released from the reactors and this was to be done with metal radiators fabricated from scrap, such as from cargo containers. Poking out above the surface, these radiators would dump the excess heat through thermal radiation, but also ensure a steady source of radiation on the surface, meaning men would have to stay away. At 50 feet (15.2 m) from the radiator, the dosage for a man within that zone would be 300 millirems per week. For reference, background radiation on Earth is around 100 millirem per year. Such a dose for the soldier within that distance would be just over 3 times the US Nuclear Regulatory Commission (NRC) sets as permissible for someone working around nuclear material. However, this was safe for the lunar surface, as the two plants would be located over 100 meters from the living quarters, about 30 meters apart. A final 60 kW nuclear power unit would also be added later, meaning no less than 4 different nuclear power units for the base to sustain life and conduct its military purposes.
The V-shaped arrangement of trenches containing the cylindrical housing modules is put together with the multi-purpose lunar construction vehicle. To the right of the image and just in the distance, can be seen the radiators for the nuclear reactors sticking out of the lunar surface. Source: Project Horizon Vol.II
Vehicles – Construction
One of the first vehicles to consider was a construction vehicle which could perform a variety of duties for the initial set-up phase of the outpost. Bearing in mind that gravity on the Moon was just 16.5% of Earth’s, this would, at first, appear to make life easier, as a 1,000 kg load on Earth would weigh just 165 kg on the Moon, but the low gravity created problems for the vehicles as well as the stability of them. On Earth, stability is based in large part on ‘normal’ gravity. With the mass distribution as it is, even if a regular bulldozer could be brought to the Moon, the weight distribution would be incorrect, making the vehicle unstable.
Vehicles would have to be weighted in order to maintain an effective power-to-traction ratio and that weight would not be brought from Earth – it would be added locally on the lunar surface. Much of the lunar vehicle work was to fall to Tiesenhausen and, as a matter of record, it should be noted that he became head of lunar mobility systems at NASA in 1963. Tiesenhausen is also primarily responsible for the lunar rover as it finally appeared as well several years later, but in terms of Project Horizon, there was primarily a concern for a vehicle for construction duties.
Weighing just 4,500 lbs. (2.04 tonnes) as its basic structure, additional mass the vehicle would need to become stable would simply be provided by means of ballasting it with lunar material, bringing its operational weight up to 9,000 lbs. (4.08 tonnes). Operating on four 4’ (1.22 m) open-spoke metal wheels, no tyres were to be used, but the speed would be low – just 1.5 mph up to 5 mph (2.4 to 8.0 km/h) so the cushioning of a rubber tire was not needed. The wheels would have diamond-shaped grousers to gain purchase on the lunar surface, and with a mass of 2,040 to 4,080 kg would, in effect, mean a weight of just 16.5% of that, making traction easier. Powered by a pair of 4 hp electric motors (rechargeable from the nuclear power-generated electricity supply from the outpost), the entire vehicle would be just 15’ (4.57 m) long, 6’ (1.83 m) wide, and 6’ (1.83 m) high and could be controlled directly through a pressurized cab where a man could work without a suit, or via radio (subject to the limits of radio range already discussed). On Earth, such a vehicle would require 20 to 25 hp per ton to operate off-road but, with the reduced gravity of the Moon, the electrical power units (8 hp total) were sufficient to meet the equivalent engine-power on the Moon and provide an operating range of 50-150 miles (81 to 241 km) although, as previously stated, anyone operating that far from a base would run a serious risk of becoming lost.
Lunar construction vehicle. Source: US Army
It was fitted with a variety of attachments, such as a U-shaped bulldozer blade, robotic arms, a crane boom, and a power take-off for a variety of other equipment which may be needed, such as an auger. This vehicle was calculated to be able to carry up to 480 cu. ft. (13.6 m3) per hour over 250 feet (76.2 m) with its 43 cu. ft. (1.2 m3) front bucket and to bulldoze up to 750 cu. ft. (21.2 m3) in the same time over the same distance. The crane would be able to lift 4,500 lbs. (2,042 kg) up to 2 feet (0.61 m) from the surface at up to 10 feet (3.0 m) from the vehicle. The vehicle would also be suitable to tow heavy loads, such as moving the habitation modules into the trenches dug for them, or supply sleds. Those would be made from leftover cargo containers which would be cut up to form rudimentary supply sleds and also to produce shielding for the habitation modules to protect from radiation and meteorite impacts. The towing capacity of the construction vehicle would be around just 50% of the total vehicle weight, just 2.04 tonnes at best.
Vehicles – Lunar Transport
To avoid the soldiers in suits having to walk around on the surface too much, a transport vehicle was going to be required. Consisting of a skeletonised frame made from light-weight metal, it was going to be compact – just 6’ (1.82 m), square, with the seat and controls exposed – avoiding the need for a cab, although a two-man cab could be used if required. A small load deck, in the manner of a miniature pickup truck, would be at the back. Also electrically powered, this 3-axle vehicle would weigh just 2,000 lbs. (907 kg), and be able to move a load of men and equipment between 50% and 300% of its own weight, depending on the nature of the surface.
Each axle would have a wheel at each end and each would have its own 1 hp electric motor for a total tractive power of 6 hp. Suitable batteries would provide a range of 50 miles (80 km) or 10 hours of operation before needing to be recharged. Interestingly, the prospective design for this vehicle is missing from the available copies of Project Horizon.
A foreign analysis of other types of lunar vehicles was published for the US Air Force in 1967 from an original document by D. St. Andreescu of Romania. Andreescu was a Major General and a member of the Commission on Aeronautics in Romania and the article the US Air Force translated in 1967 was first published in 1963. Andreescu’s work had involved looking at conflict and exploration in space at least as early as 1957, so it is no surprise that his work would garner attention from the US. What is more unusual perhaps and was apparently missed was that Andreescu’s vehicles are taken in part from the art of American Frank Tinsley who drew several of them for the magazine Mechanix Illustrated.
Rocket-type lunar lander from the front page of Andreescu’s 1963 article. Source: Andreescu. Note that this image is copied from a 1958 artistic drawing by American artist Frank Tinsley which appeared in Mechanix Illustrated.Rocket-type lunar lander in the distance and the spherical ‘unicycle’ design in the foreground in the original artwork from Tinsley, 1958. Source: Neverwasmag.com
The Foreign Technology Division (the US Air Force Branch responsible for identifying and analyzing foreign technical material) investigated what ‘the other side’ was looking at in terms of potential lunar vehicles. Originally titled ‘Vehicule Lunare’ [English: Lunar Vehicles] in the original Romanian article by Andreescu, the report considered that a Moon-based command post was, just like the USA had concluded, a logical step in the steady conquest and use of space. Andreescu considered a few different types of vehicles and types of power systems for lunar propulsion, including tracks, wheels, a large rolling spherical body, helicoidal screws, rockets, electric motors, walking machines, flying machines, and even leaping or ‘bounding’ vehicles. In doing so, he appears to have been drawing upon ideas or designs which predated this 1963 work, and although it is unclear where he got them from the US Air Force document they are clearly lifted very closely from illustrations in Mechanix Illustrated magazine.
There are, however, two vehicles of particular interest from Andreescu. One, a giant tracked ball virtually identical to the vehicle shown in the Project Horizons plan, and a small tracked lunamobile. Whilst the former vehicle does appear in the Project Horizon report, the second does not – it only appears in a 1967 US Air Force translation of his paper. Of the multiple vehicles Andreescu discussed, therefore, it is those two which are of the most interest in terms of Project Horizons.
Spheres and Tracks
The ‘tank-like’ vehicle ran on wide tracks supported by four large road wheels and a drive or jockey wheel at either end. It is not clear which end the power was supplied to the tracks, as it is not shown in the available image of the vehicle. No supporting rollers are shown. The track is, however, covered across the top by a large dust shield to prevent clouds of regolith being thrown up as it moves. The body of the vehicle is flat-sided, with a shallow sloping front surface, which on a tank would be the ‘glacis’. The rear is more sharply angled. On top of the vehicle is shown what appears to be an exhaust stack for venting gas and/or heat, much like a ship’s funnel over the back end, with a large dome with multiple large rectangular windows at the front of the roof. Inside are shown a trio of astronauts.
Completing the vehicle are a pair of headlamps at the front, a flapped-horizontal slot and a circular feature (perhaps a light) on the ‘glacis’. Projecting from the front, just below those headlamps, are a pair of supporting arms for what appears to be a bulldozer blade.
It would be powered by electric motors running on compressed (pressurized) hydrogen provided by a turbogenerator and recharged by use of nuclear power generators. This power supply would propel the vehicle on the lunar surface at up to 40 km/h for 24 hours of continuous use between recharges. The heat irradiated from the passengers on-board would boil off the hydrogen fuel source and this heat was then recaptured by a lithium hydride recuperator. This power supply would weigh just 1,200 kg – more than 200 kg less than an equivalent diesel engine and without the problems of liquid fuels in a lunar environment.
With a crew of three in the bubble on top, this 1.2-ton lunar vehicle uses the heat from the humans as part of the propulsion system. This image is identical to the one featured in the 1967 US Air Force translation but does not appear in the 1958 Project Horizon plan. Source: Andreescu Note: surrounding text from the image has been digitally removed for the sake of clarity but the vehicle image has not been altered.
If the tracked lunamobile is rather mundane as a tracked vehicle, albeit one for the Moon, then it is the spherical vehicle idea from Andreescu which is perhaps the most curious. This was a vehicle with a spherical hull and held upright by means of “hydroscopic” (gyroscopic) stabilisation, ensuring the 3 or 4 men inside would stay correctly orientated in relation to the lunar surface. Running on a single circumferential track, the spherical lunamobile was thought to be useful for exploring the surface due to its shape, which would prevent it from becoming stuck in a crater. A second track that appears to run circumferentially around the vehicle in the horizontal plane, is in fact spare sections of track for the vehicle.
Power was supplied by a large circular solar cell acting like a parasol above the vehicle, which could be angled to receive maximum solar radiation, although no other details are provided by Andreescu or the US Air Force. In the original Mechanix Illustrated magazine article, the vehicle is stated to be inflated using a skin made from rubberised fabric.
A 30′ (9.14 m) diameter gyroscopically-stabilised tracked ball vehicle with overlapping circumferential track, this highly impractical vehicle was pictured in some form to be useful for exploring the surface. This image is identical to the one featured in the 1967 US Air Force translation and also appears in the 1958 Project Horizon plan and is virtually identical to the vehicle drawn by artist Frank Tinsley in Mechanix Illustrated magazine in 1958. Source: AndreescuThe cover of Mechanix Illustrated magazine showing the gyroscopically stabilised spherical machine leaves no doubt as to Andreescu’s inspiration for his article. Source: Neverwasmag.com
The curious matter about this vehicle, described in General Andreescu’s report from 1963, is that this vehicle features at all. It is, in fact, identical to the spherical lunar vehicle seen in Volume III of the Top Secret Project Horizons plan, a plan which was still secret through this time. Looking at the two views of this vehicle in these two reports, it is hard not to see that one party must have known about the other and, as Horizon was 4 years before Andreescu’s report, it would seem at first glance that Andreescu took inspiration from it for that image. The Project Horizon work was, for decades, Top Secret, so it is highly unlikely he could have seen the tracked spherical lunamobile. Instead, the logical conclusion is that the spherical tracked vehicle predated the Project Horizon in some non-classified form from which ABMA and, in due course, Andreescu, drew inspiration and that in fact comes from the distinctly non-secret origins of the front cover of Mechanix Illustrated magazine published in 1958.
The spherical lunar vehicle as pictured in the 1959 Project Horizon (left), and the 1963 Andreescu Romanian report (right). The similarities between the two (other than the horizontal track running in the other direction) are as undeniable as the origins of the vehicle on the cover of Mechanix Illustrated. Source: US Army and Andreescu (via US Air Force) respectively.
The use of the spherical exploration machine in the Project Horizon plan comes up during discussion of combat too, so it is fair to say that where concepts of combat on a lunar surface are concerned- they would, in the eyes of the planners, inevitably involve vehicles and probably tracked ones at that.
Combat
With a very credible Soviet space program and the sense of a race to the Moon, it was part of the planning activities of the program that there was a potential for the base to be attacked by the Soviets. It would, afterall, be a base for nuclear weapons and needed guarding. In considering combat on the lunar surface, the environmental considerations of temperature, pressure (or rather, the lack of pressure), and the low gravity made for a complex combat situation.
“…sole possession of a lunar outpost… would provide a military advantage in case of terrestrial hostilities. Defense must be provided to deter attack to obtain such an advantage”
Project Horizons Vol.I
Development of various elements of equipment to meet the needs of defending the men and equipment on the outpost was going to be divested to the various expert technical agencies. For example, nuclear weapons systems would be left to the Atomic Weapons Laboratories at Picatinny Arsenal, electronic systems would be in the hands of Diamond Ordnance Fuze Laboratory (DOFL), and missile/rocket design would go to the US Army Ordnance Missile Command (AOMC). On the surface of the Moon, vehicles were going to be needed to move around, build facilities, and provide security and these were to be left in the hands of the Ordnance Tank-Automotive Command in Detroit with responsibility for “developing and testing both combat and transport vehicles to meet special requirements”.
“If the moon and other planets are explored and possibly colonized, the world could eventually see a second evolution of weaponry and protection therefrom. Visualise starting with a weapon capable of penetrating thin-skinned vehicles. The vehicles then get thicker skin. The weapons then attain a greater penetrating capability. The vehicles get even thicker skin until the weight and cost thereof becomes insurmountable. The weapons attain longer ranges etc., etc., etc.,. This proceeds through the mortar, howitzer, gun and tank stages until eventually you have missiles, antimissiles and nuclear weapons…..”
US Army Directorate of Research and Development, 1965.
Just as the comment above related to ‘tanks’, it was part of Project Horizon’s initial assessment that the use of vehicles in a potential attack or defense at the outpost was a credible concern. Although they could not carry armor in the sense of a conventional tank due to the difficulties in getting such a vehicle to the Moon, it was certainly conceivable such vehicles may have some ballistic protection beyond just retaining a pressurized atmosphere within the vehicle. Thus, any weapons planned for the outpost should also have had an anti-materiel ability to perforate a vehicle and depressurize it or cripple the automotive parts.
Such a unique combat environment precluded the use of conventional ammunition and weapons like rifles. This is not, as may be thought because the ammunition would not work in an oxygen-free atmosphere. It would work (albeit with some known problems with primer activation in a vacuum) – modern ammunition has its own oxidizer self-contained, so a rifle would indeed work. In fact, the lack of moisture and oxygen actually helps to preserve plastic explosives and prevent corrosion infuses, etcetera, although non-plastic explosives like TNT would degrade with the temperature extremes. Such conventional firearms were, however, designed to fire in Earth-gravity situations, so the sights would be almost useless on the Moon. Add to this that the reduced gravity on the Moon would seriously affect the trajectory of any bullet fired on the surface and that other features of a conventional rifle, like a stock, were not required because a man in a suit would not be able to carry the weapon easily in such a way and what is left is the need for a bespoke weapon – albeit it one which might use conventional-types of ammunition. However, that too involved a lot of weight-wastage through a casing. Newton’s Third Law of Motion states that for every action there is an equal and opposite reaction. In other words – recoil, and this recoil would be harder to manage for the soldier in a low gravity environment. With no effective atmosphere either, any missile fired would not be subject to drag from friction, like it would on Earth, and would increase the range of a projectile by some 6 times or more. The same was also true of the explosive out-gassing behind a recoilless weapon, making them extremely hazardous to friendly vehicles, buildings, or personnel behind. The same applied to explosively producing fragments/debris, as it would travel further and faster than on Earth. Given that penetration is a function of the square of the velocity of the projectile, even bits of regolith kicked up by a blast created an enormous hazard for men and machines.
The effect on-target of the projectile or directed energy device differed substantially from terrestrial combat too, as substantial damage could be done to a target simply by exposing it to the vacuum of space, piercing the suit or vehicle skin.
An attack on the outpost from the Soviets could not come without warning. Either the launch would be detected or the launched-craft picked up by Earth-based monitoring. If a craft could be landed secretly, the outpost would also have a short-range radar set with a range of up to 2 miles (3.2 km) and backed up by an active infra-red system with a range of 400 – 500 yards (366 – 457 m) range.
Planning assumption for outpost defense related to a roughly platoon-sized attacking force, but defense had to consider combat in 4 situations:
Space-suited personal combat
Lunar surface vehicle combat
Moon-orbiting space vehicles
Non-orbiting space vehicles
Project Horizon considered various modes of killing or incapacitating an enemy force approaching the perimeter of the outpost (scenarios 1 and 2 above). This perimeter defense had to be able to provide adequate means of killing both suited men and also vehicles and should be fireable directly or remotely. Options for such a weapon were considered and evaluated for both performances but also whether they were technically feasible.
These included
Beamed electromagnetic radiation
Flamethrower
Blast weapons
Fragmentation weapons
Radiant energy
Defending against orbiting craft was more complex than a surface defense and, whilst an orbiting enemy could be tracked using Hercules, Zeus, or Hawk radar, it would be difficult to engage as available surface to air (or in this case surface to orbit) missiles were well beyond the 1,000 lb. (454 kg) weight limit imposed and a new bespoke weapon was needed. This would be expensive and with a long development time. An electron accelerator-based weapon was considered and would work by directing beams of gamma and/or neutron radiation at a craft to kill the crew and damage the craft. Just like the missile idea, however, this was far too heavy, 6,000 lbs. (2,722 kg) on Earth for such a system and still over 1,000 lbs. (454 kg) equivalent for a lunar-based system. In conclusion, Project Horizon rationalized that no effective defense could be provided against an orbiting enemy vehicle and the men on the outpost could, at best, dig into the surface to obtain protection until a suitable missile defense system became light enough to install there.
Personal Combat
With a set of unique problems from the environment (lack of atmosphere and exposure to solar radiation), equally unique weapons would be needed for troops to use if combat was to take place between US soldiers and a (presumably Soviet) force landing there.
Spacesuits would have to include an element of armor protection, along with the ability to self-seal following perforation, as a simple weapon that made even a small hole in a suit could prove lethal. More holes meant a greater chance of killing the opponent with the environment rather than the terrestrial method of killing the opponent by means of trauma. Weapons that optimized the delivery of high-velocity fragments were therefore considered the most desirable.
May 1959 design for a ‘Lunar Clothing System’. It owes more to Buck Rogers than a practical suit. The ice-skate-looking devices on the boots are soles to help stop the astronaut from sinking and presumably he would want some gloves too, although these are not shown in the drawing. Source: US Army
The suit proposed by Project Horizon included a hard suit for the body, made from titanium approximately 4 mm thick for standard protection and up to nearly 10 mm thick for maximum protection covering the stomach and chest, with a composite inner layer for resisting radiation. The same would go for a vehicle, with a titanium metal structure of approximately the same thickness to provide some resistance to fragments and also to maintain pressurization. Later, in analyzing how much protection 3.70 – 9.25 mm of titanium could actually provide on the lunar surface, it was calculated that a simple 6 grain (0.38 gram) fragment at 3,800 ft/s (1,158 m/s) or a 17 grain (1.10 gram) fragment at 2,400 ft/s (732 m/s) could pierce the suit or vehicle.
In terms of personal firepower, Project Horizon considered the various options and limitations which had to be considered, such as having to be self-sustaining.
The assessment was clear that the best weapon for defeating an enemy force either suited on-foot or in a vehicle of any description would be a Claymore-type mine. The standard Army type coming into service was the T48E1 mine, weighing just 1.36 kg and containing 675 5.56 mm diameter steel balls in a plastic resin. Once detonated, these balls, which were arranged in a slightly concave shape, would be fired out at a speed of 3,700 to 3,900 fps (1,128 to 1,189 m/s) across a 60-degree arc. On Earth, the mine’s effective lethal radius was around 200 feet (61 m), but on the Moon, with no atmosphere to slow down the balls and low gravity, the effective lethal range was increased to 2,500 feet (762 m), although the spread of the balls at that range would be extreme.
The Claymores could be set as a perimeter defense to be triggered upon command or by a tripwire, but they could also be handheld. This was not as hazardous as it may sound as, due to the vacuum of space, there was no blast hazard to the man detonating it on the end of a pole 5 to 6 feet (1.52 to 1.83 m) long. With a suitable shield surrounding the back of the mine to prevent mine fragments from being fired at the soldier wielding this weapon, in total, it was under 1 kg in weight. This made it simple, cheap, and easy to use for all combat purposes against men or machines.
T48E1 Claymore Antipersonnel mine. Source: US ArmyClaymore mine detonated to kill approaching enemy forces on the lunar surface. Note the presence of the tracked spherical lunamobile in the image. Source: US Army.Handheld claymore-type directional fragment weapon. This odd-looking device was ideal for use against men and vehicles on the lunar surface. Source: US ArmyArtist’s impression of the handheld claymore device in use by a US Soldier against an unidentified adversarial force on the lunar surface. Source: US Army.
Whilst the attack scenarios involving orbiting were complex, the judicious use of detonating a nuclear weapon nearby was possible. Detonating a 10MT nuclear device in space, launched from the outpost for protection would, for example, have a lethal radius of around 320 km, although it did mean having to station nuclear weapons there and obviously accepting the risk of killing yourself with your own weapon’s radiation (unlike a detonation in Earth’s atmosphere, a nuclear blast in a vacuum primarily produces intense radiation rather than blast or thermal energy release). Even should the outpost detonate a weapon in lunar orbit to defend against an attacking craft, the lack of atmosphere on the surface meant that there would be no attenuation of the intense radiation, creating a hazard for the outpost.
Proximity to the blast was one of the notable flaws of the Army’s new M-28 ‘Davy Crockett’ nuclear weapon system. Often referred to as a recoilless rifle system, the M-28 was, in fact, a type of spigot mortar (120 mm) that could throw the 23 kg Mk.54 nuclear warhead around 2 km. With a yield of 0.01 to 0.03 kT of TNT, the warhead on Earth would cause severe damage over a 10 m radius and moderate blast damage out to around 500 m (surface detonation), and up to a kilometer as an airburst. On the Moon, with no atmosphere to attenuate the explosion, damage could spread a lot further but so could the potential range of the warhead.
The Davy Crockett, fired at a maximum angle of 45 degrees, could, from the Moon, reach a lunar altitude of just over 1,200 m – high enough to be a threat to a descending enemy craft but not high enough to engage an orbital target and both with serious personal safety issues.
M-28 ‘Davy Crockett’ Short Range Spigot system. Source: US ArmyThe variation in terrestrial and lunar trajectories for the M-28 ‘Davy Crockett’ are shown starkly in this graph where the range on Earth is just 1,800 m compared to on the Moon at 15,500 m. Source: US Army
An alternative to the M-28 was also considered, one which was more accurate, lighter, and simpler, but with a shorter range. This was the Dumbo II, which was still on the drawing board and consisted of little more than a launching tray on legs with a rocket-propelled bomb loaded into it. On the lunar surface, this device would have a range of just 4,400 yards (just over 4,000 m) with an accuracy of 40 yards (37 m). It was, in the understatement of the decade, “desirable” to increase the range. With a range improvement to 17,700 yards (just over 16,000 m), it would increase the weight from 130 lbs. (59 kg) to 160 lbs. (72.6 kg).
Dumbo II short-range nuclear weapon system. Source: US Army
In 1965, this subject of lunar personal weapons was examined once more by the US Army in the unusual title report “The Meanderings of a Weapon Oriented Mind When Applied in a Vacuum such as on the Moon”.
The cover-art of the June 1965 Army report features a weapon carrying vehicle on multiple legs with two space-suit clad soldiers. One is showing off with a pair of weapons in use at the same time followed by the less well armed soldier behind. Such artwork on an Army report was no doubt very exciting to see, but did not add a great deal of technical credibility to the reader and is more in keeping with science fiction rather than the plausibility of lunar combat. By the time of the report, all matter of lunar exploration had been handed over by the Army to NASA. Source: US Army
With the problems of cold welding over close-fitting and non-low friction metal parts, no lubricants, the temperature extremes in which it would have to operate and the issue of recoil from conventional-type weapons, solutions to a projectile weapon were perhaps harder to overcome in some regards than for a vehicle. The laser (‘Light Amplification by Stimulated Emissions of Radiation’), a concept of creating a focussed and intense beam of light, had been theorized for some time but did not exist before May 1960, when Theodore Maiman made the first laser (a ruby-laser) at the Hughes Research Laboratory in California. To theorize a laser weapon was beyond the ability of engineering in 1965 when the paper was written. It was not until 1967, with Co2 lasers of over 1,000 watts, that the first lasers were powerful enough to cut through even a sheet of steel 1 mm thick (TWI- The Welding Institute Cambridge, England), and the US Army paper actually suggested a lead time of at least 20 years. Although proposed in 1965, therefore, as a solution, laser-based systems were just pie in the sky, leaving recoilless weapons or very-low recoil weapons as the next best probable alternative.
Projectiles considered were rockets of various descriptions, balls (spheres), flechettes, and even rocks, which, based on the low gravity environment, would travel 2.73 times further than on Earth. For example, fired from the shoulder of a 6’ (1.8 m) tall man 5’ (1.5 m) from the ground at 3,000 f/s (914 m/s), a projectile would go 8,190 feet (2,500 m) when fired horizontally. Rather hazardously, however, was that due to the lack of atmosphere, if the projectile were fired upwards above the horizontal plane, it could go enormous distances. At 45 degrees, for example, a projectile launched at 3,000 f/s (914 m/s) (well short of the escape velocity of 2,400 m/s), would travel 320 miles (515 km), having reached an altitude of 80 miles (129 km) above the lunar surface.
The lack of ‘drop’ on the round added the severe hazard of projectiles in flight for large distances and long periods of time but had one significant advantage – the lack of anything other than the most rudimentary of sights being required. This is because a projectile would drop just 60 mm or so for every 100 m. Given a maximum line of sight engagement range of maybe 1.5 km, a projectile would, at worse, drop just 90 cm.
The lack of atmosphere also meant that wind resistance was effectively zero, so the shape of the projectile did not matter in terms of an efficient ballistic shape. Although ‘armor’ was not probable, it was objectively going to be easier for a spacesuit to resist perforation by a blunt object than a pointed one. Considering that vehicles were also a possibility, a pointed projectile with a high sectional density was preferred to aid in perforating the skin on those as well. The report concluded with a series of prospective weapon types summarised below. Noteworthy is that none of them are as expensive or perhaps simple and dangerous to men and vehicles as the Claymore-on-a-stick proposed in Project Horizon.
Suits
Exo-activity on the lunar surface (or even in space, as a ‘space-walk’) had not been done in 1959, so some of the suit-ideas and the science of space-suits were not fully developed by the time. There were, however, clear goals for a practical suit and the advantage of the low gravity meant that a 300-pound (136 kg) spacesuit would weigh just 50 pounds (22.7 kg) equivalent on the lunar surface.
Nonetheless, wearing a suit is a tiring task and normal wear would be limited to just 8 continuous hours, although 12 hours was acceptable. With a degree of caution, a man may operate in his suit for up to 24 hours and, in a dire emergency, 72 hours.
Referred to as a “metallic body conformation suit”, the outer surface was to be shiny (like all good 1950’s sci-fi) in order to reflect heat, but tough enough to resist the impact of micro-meteorites.
Any combat taking place in such a suit would be awkward and obvious to any attacker.
Termination
In 1959, there was a serious lack of crucial data on which to make some decisions – such as where to even put the base. Earth-based observations of the Moon could show the ‘seas’ – large flattish areas with few impacts, but the best available map being made by the Army Map Service at the time was just 1:5,000,000 scale and the contours were 2,000 feet (610 m) apart, meaning what looked flat could actually be quite a steep slope and landing on a cliff was ill-advised. An improved version of the map, due in around 1960 using better methods of stereo-image analysis, would be 1:1,000,000 scale with contours just 300 meters apart, with the aim of getting accuracy on surface features down to 150 or even 100 m by 1962. It is obvious, therefore, that with so little known, any outpost might find itself on impossible terrain. Any such landing without a better idea of the terrain was impossible in practical terms.
This was a fundamental part of the death knell for such ideas. It had not been the costs that killed Project Horizons perhaps as much as politics and practicality. It was not seen as being unfeasible or even unaffordable but perhaps just not necessary. The idea of launching at least one new Saturn rocket a week for years on end was one thing the Army could live with, but with the formation of NASA in October 1958, the writing was on the wall for the Army. NASA would take over all of the space work from the Army and Project Horizon, in particular, was handed over to their control by General John Medaris in March 1960. NASA had no interest in this project and it was thus left to die. The rest of the Army’s role in space was also handed over by the first half of that decade and the Army regained its terrestrial focus.
No weapons base on the Moon meant no need for weapons against men and machines, no lunar combat, and no ‘Moon-tanks’.
In 1967, with the signing through the United Nations of the Outer Space Treaty (OST), all signatories (including the USA and the Soviet Union) agreed not to place nuclear weapons in space (Article IV) either in orbit or on a celestial body (like the Moon), and that the Moon, in particular, was to be used exclusively for peaceful purposes. It also prohibits the establishment of military bases, installations, and fortifications on the Moon (Article IV), although military facilities for peaceful purposes were not prohibited. The treaty did not end ideas for a Moonbase, like Project ARES in the 1990s, but it did preclude space-based nuclear weapons. A further treaty, known as the Agreement Governing the Activities of States on the Moon and Other Celestial Bodies (‘The Moon Treaty’) signed in 1979 and effective from 1984, added to the Outer Space Treaty by prohibiting the creation of military bases although neither the United States nor the Soviet Union (or now Russia) have ratified that treaty.
“Article IV State Parties to the Treaty undertake not to place in orbit around the Earth any objects carrying nuclear weapons or any other kinds of weapons of mass destruction, install such weapons on celestial bodies, or station such weapons in outer space in any other manner.
The Moon and other celestial bodies shall be used by all State Parties to the Treaty exclusively for peaceful purposes. The establishment of military bases, installations, and fortifications, the testing of any type of weapons, and the conduct of military maneuvers on celestial bodies shall be forbidden. The use of military personnel for scientific research or for any other peaceful purposes shall not be prohibited. The use of any equipment or facility necessary for peaceful exploration of the Moon and other celestial bodies shall also not be prohibited.”
United Nations Office for Disarmament Affairs: Treaty on Principles Governing the Activities of States in the Exploration and Use of Outer Space, including the Moon and Other Celestial Bodies 1967. Underlining added by the author. Full text at http://disarmament.un.org/treaties/t/outer_space/text
“No national sovereignty rules in outer space. Those who venture there go as envoys of the entire human race. Their quest, therefore, must be for all mankind. And what they find should belong to all mankind.”
President Lyndon Johnson in ‘The President’s News Conference
at the LBJ Ranch (29th August 1965).
Collected in Public Papers of the
Presidents of the United States:
Lyndon B. Johnson: 1965 II (1966), 944-945.
Project Horizon was, perhaps, more of an embarrassment just a few years after it had been completed. The new NASA-controlled program was not interested in nuclear weapons on the Moon and the Defense Department fought to prevent its release to the public. In a 3 year struggle (1959-1962), the project was subject to numerous requests for release and, after no less than 10 separate security reviews by 3 different intelligence agencies, it was finally revealed at the end of the year. The project was effectively obsolete before it had even been finished, regardless of future changes, but it can be said that the project did form an important mental step in the long process of getting men to the Moon and, for Tiesenhausen – for what would eventually convey astronauts on the lunar surface with the Apollo 15 mission in July 1971.
Tiesenhausen’s work finally reached its fruition in the form of the lunar rover (Lunar Roving Vehicle – LRV) on the Apollo 15 mission. It took the simple option of tires over tracks. Source: NASA
A small 1.2-ton construction vehicle meant for the lunar surface. It would have been useful not only for constructing the base but also for constructing defensive positions. Illustration by Pavel ‘Carpaticus’ Alexe, funded by our Patreon campaign.
Sources
Andreescu, D. (1958). Incotro, spre Marte sau spre Venus. Ed. Militara MFA. Bucharest, Romania
Andreescu, D. (1959). Va scriu din Gara Cosmica. Ed. Militara MFA. Bucharest, Romania.
Andreescu, D. (1959). Racheta Arma Si Vehicul. Ed. Militara MFA, Bucharest, Romania.
Andreescu, D. (1963). Vehicle Lunare. Stiinta Si Tehnica No. 9, 1963. Romania.
Andreescu, D. (1967). Lunar Vehicles. Foreign Technology Division FTD-HT-66-132. US Air Force systems Command. Translated from the original in Stiinta Si Tehnica No. 9, 1963.
Bernstein, L. (2004). The Army and Space 1958-1984. Army Space Journal, Fall 2004
Directorate of Research and Development. (1965). The meanderings of a weapon oriented mind when applied in a vacuum such as on the Moon (U). Directorate of R&D, Future Weapons Office, Illinois.
Georg von Tiesenhausen (Dr. Donald Tarter Video Interviews) Interview date 1/1/1987. https://www.youtube.com/watch?v=YwrAl0gLuaI
Godwin, R. (2019). The Forgotten Plans to Reach the Moon – Before Apollo. Air and Space Magazine https://www.airspacemag.com/daily-planet/forgotten-plans-reach-moon-apollo-180972695/
Hall, R. (1992). The Origins of U.S. Space Policy: Eisenhower, Open Skies, and Freedom of Space. BMD Technical Information Center, Washington D.C., USA
Huntsville Times. Obituary: Georg H. P. Baron von Tiesenhausen. 8th June 2018
Kipp, J. (1988). The Problem of Space in Soviet Operational Art. Soviet Army Studies Office, Fort Leavenworth, Kansas.
Lang, S. (2017). SMDC History: Project Horizon: ABMA explores a lunar outpost. US Army. army.mil/article/189129
Merstallinger, A., Sales, M., Semerad, E., & Dunn, B. (2009). ESA-STM-279 Assessment of cold welding between separable contact surfaces due to impact and fretting under vacuum. ESA Communication Production Office, The Netherlands.
Military Lunar Base Program (C) or S.R. 183 Lunar Observatory Study (U). Vol. I. Study Summary and Program Plan. ARDC Project No. 7987 April 1960. Air Force Ballistic Missile Division, California.
NASA Public Affairs Office. (1986). Biography of Georg F. Von Tiesenhausen.
National Space Society: Fischer, (D). (2010). 1959 – Twelve Men on the Moon.
Peenemunde Interview Project. NASM.1999.0038. Von Tiesenhausen, Georg. Interview conducted 22/1/1990. https://www.si.edu/media/NASM/NASM-NASM_AudioIt-000006598DOCS-000001.pdf
United States Congressional Serial Set. Issues 12750-12751. (1972). Senate Documents 92nd Congress 1st Session January 21 – December 17, 1971, Vol. 1-2. United States Government Printing Office, Washington D.C., USA. Page 67-572 O-71-6
US Army. (1959). Project Horizon Volume I: Summary and Supporting Considerations. United States Army, Washington D.C.
US Army Ordnance Missile Command. (1960). A Lunar Exploration Program Based Upon Saturn-Boosted System. RCS-ORDXM-C-1004.
NASA. (2014). Lunar Temperatures from Lunar Reconnaissance Orbiter.
Never Was blog. ‘The art of Frank Tinsley’. www.neverwasmag.com/2021/07/the-art-of-frank-tinsley/ 7th July 2021.
Reiffel, L. (1959). A Study of Lunar Research Flights Vol. I. Defense Documentation Center for Scientific and Technical Information, Air Force Special Weapons Center.
Riggs, R. (May 1959). Outer Space and National Defense. Military Review Vol. 29, No. 2,
P.21-26.
Space.com: Sharp, T. (2017). Atmosphere of the Moon
Space.com: Redd, N. (2017). What is the Moon made of?
Space World. (1987). Last of the Rocket Team: A Conversation with Georg von Tiesenhausen.
US Army. (1959). Project Horizon Volume II: Technical Considerations and Plans. United States Army, Washington D.C.
US Army. (1959). Project Horizon Volume III: Military Operational Aspects, United States Army, Washington D.C.
US NRC. Personal Annual Radiation Dose Calculator. https://www.nrc.gov/about-nrc/radiation/around-us/calculator.html
US National Security Council Action No. 1846, 22nd January 1958 (NSC 5814/1 ‘Preliminary U.S. Policy on Outer Space 18th August 1958’)
United Nations Office for Disarmament Affairs: Agreement Governing the Activities of States on the Moon and Other Celestial Bodies. http://disarmament.un.org/treaties/t/moon
United Nations Office for Disarmament Affairs: Treaty on Principles Governing the Activities of States in the Exploration and Use of Outer Space, including the Moon and Other Celestial Bodies. http://disarmament.un.org/treaties/t/outer_space
Washington Post. 11/10/1962. Moon Study is Released by Pentagon.
Washington Star. 25/9/1962. Moon Study Gets Security Treatment.
United States of America (1984-1987)
Combat Vehicle – Models Only
In 1984, the US military was considering the problems connected with a new range of vehicles, such as the M1 Abrams main battle tank and the M2 Bradley Infantry Fighting Vehicle (IFV). As part of the evaluation of trends in future vehicles, a commission was formed to look into the potential for electric drive systems for a 40-ton (36.3 tonnes) (tank) and 19.5-ton (17.7 tonnes) (APC/IFV) platform.
The US Army’s Tank Automotive Command (TACOM) issued a contract to General Dynamics Land Systems for this project – to evaluate existing electric drive technologies to use in future vehicles. This contract was given the number DAAE07-84-C-RO16 and was divided into 2 phases – a third phase was added later under contract modification P00006.
The goal was roughly that of evaluating the ‘new’ (electric drive for vehicles predates armored vehicles themselves) technology available across a variety of platforms for what it may offer for further development. What it actually generated was the realization that electric-drive fighting vehicles were not only possible but had some valuable features worth exploring, especially with regards to a series of heavy IFV platforms. However, like so many other studies, this work faded away and the design work was abandoned. To this day, in 2020, the M2 Bradley remains in service with a conventional power plant along with numerous other armored vehicles in the US inventory. Despite the billions of dollars spent, to date, the US military has yet to capitalize on the potential of electric-drive vehicles.
The beginning
Work on a future electric drive combat vehicle was to consist of three phases of work:
Phase I: A survey of existing technology (document JU-84-04057-002)
Phase II: Generation of concept vehicles with electric drive
Phase III: A parametric study and evaluation with a selection of 3 recommended concepts for further consideration
General Dynamics had actually been looking into the potential of electric drive systems as early as 1981, producing electric-drive concept vehicles for various other vehicle projects. It also had possession of a 6 x 6 wheeled, 15-ton (13.6 tonnes) Electric Vehicle Test Bed (EVTB) it had paid for itself in order to test and validate electric drive. It also had an Advanced Hybrid Electric Drive (AHED) 8 x 8 vehicle in the 20-ton class using lithium-ion batteries.
General Dynamics Advanced Hybrid Electric Drive (AHED) 8 x 8. Source: DiSante and Paschen
The timetable for the project called for Phase I to be concluded by the end of 1984. In the end, the report on this phase was finished in July 1984 and then published in January 1985. By this time, the second phase was already underway, with an expected conclusion date in the latter half of 1985 followed by another report and, starting in the middle of 1986, Phase III running through into the start of 1987.
Why Electric Drive?
The potential of electrical drive systems for tanks was recognized and experimented upon as far back as WW1. An electrical transmission offered the designer a significant freeing up of the internal layout of an armored vehicle, as the drive motors did not have to be next to the engine, and the ability to deliver continuous, reliable power in preference to mechanical systems. This is primarily because an electrical drive system has far fewer moving parts and bearing surfaces than a mechanical system. There are also major advantages, not the least of which being volume. An electrical system could be smaller than the equivalent mechanical system and a smaller volume meant more internal volume in a vehicle for other things and/or a reduction in the amount which needed to be protected by armor – that means less weight too. Electrical transmissions are also quieter due to the absence of gearing and driveshafts and offer the not insignificant potential to provide electrical power for the vehicle’s systems.
One of the biggest advantages of e-drive over a conventional powertrain (liquid-fuel burning engine connected to a mechanical transmission) is that the engine, generators, and motors do not have to be co-located within the vehicle, significantly freeing up potential layouts for the vehicle.
Study concepts
Some 38 possible concepts across the 19.5 (17.7 tonnes) and 40-ton (36.3 tonnes) vehicles were considered over four basic vehicle considerations. Various companies and one university submitted concept plans for the program, namely: Westinghouse, ACEC (Ateliers de Constructions Electriques de Charleroi), Unique Mobility, Garrett, Jarret, and the University of Michigan. All of the options were to consider an automotive scheme for a baseline vehicle.
19.5 ton (17.7 tonnes) Baseline Vehicle Concept. Source: GDLS
Baseline Vehicle Description
The baseline vehicle was a departure from the rather large body of the M2 Bradley. The essential layout, however, was very conventional. Riding on six wheels attached to what appear to be suspension arms, it appears to have torsion bar suspension, with the track running on these 6 sets of road wheels on each side which were divided into two groups of three and supported on the top with a trio of return rollers.
A driver sat in the front left with the power plant alongside on the right. Behind this was the fighting and troops’ space with a turret set slightly back from the center. The two-man turret carried all of the armament for the design, consisting of a single .50 caliber (12.7 mm) heavy machine gun with an elevation range of -15 to +30 and 1,000 rounds of ammunition. On each side of the turret was a pair of Dragon anti-tank guided missile (ATGM) launchers with another 4 missiles stowed at the back of the turret.
Finally, the troop space at the back, as can be imagined from a relatively small vehicle with a turret, was also small. Although only two men are shown drawn in the vehicle, it is probable that another two would be seated opposite for a troop space of 4 men, although how happy they would be to know that they were sat atop the 640-liter fuel tank is anybody’s guess.
It is important to remember though that the vehicle shown in the drawing, whilst more than a mere doodle of a viable armored personnel carrier (APC), should only be taken as an illustration of a possible future APC. The power plant work could just as legitimately be refitted to another vehicle as the key part of the study was not this APC per se, but a study to evaluate these power systems for AFV propulsion.
19.5-ton (17.7 tonne) Vehicle Concepts
With four (five including one minor amendment) configurations being considered, the design task was simplified by the specification of the engines to be used. The 19.5-ton (17.7 tonne) vehicle would use the Cummins VTA-903T generating 500 hp. The engine would then drive generator/s to provide power to various configurations of motors with a goal of a road speed of 45 mph (72.4 km/h).
Dimensions were set with a ‘datum’ concept vehicle with a hull height of 72” (1.83 m), an overall height of 96” (2.44 m), a distance of 150” (3.81 m) from the center of the front road wheel to the rear roadwheel, and a total length of 246” (6.25 m). The tracks were to be 17.5” (445 mm) wide with a total vehicle width of 110” (2.79 m). Armament was to be concentrated on a small turret located centrally width-wise and just back from the center of the length of the vehicle. All of the 19.5-ton (17.7 tonnes) vehicle concepts used an ‘engine forward’ arrangement leaving a large space in the rear of the vehicle suitable for carrying troops or other payloads. Armament was likewise the same on all of the 19.5-ton (17.7 tonnes) concepts: a single heavy machine in the small turret flanked on each side by a fire of anti-tank guided missile (ATGM) launchers.
Each design was identified by a concept number followed by a design number. For example ‘I-5’ was Configuration 1 Design 5, whereas II-5 was Configuration 2 Design 5 and so on. Vehicle concepts selected to go forward from theoretical design to a drawing stage were all allocated a drawing number starting AD-8432-xxxx.
Having outlined various conceptual vehicles, those which were successful were authorized to be drawn and, of those, five 19.5-ton (17.7 tonnes) vehicle concepts were selected on the basis of an efficiency scoring system that assessed a variety of factors such as weight, volume, the efficiency of the system, and technological ease. Despite it being a heavier system than the others, it was the Belgian ACEC system that was selected as being the best of all of the possibilities for the new vehicle. One proviso to this was that the Jarret system was received late in the assessment process and potentially could have been better than the ACEC – the design team recommended it receive further development too.
Garrett 19.5 ton (17.7 tonne) Concept I-1. source: GDLSWestinghouse 19.5 ton (17.7 tonne) Concept I-2. source: GDLSACEC 19.5-ton (17.7 tonne) Concept I-5. Source: GDLSGarret 19.5 ton (17.7 tonne) Concept I-6. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept I-9. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept I-9A. Source: GDLSGarrett 19.5 ton (17.7 tonne) Concept I-10. Source: GDLSGarrett 19.5 ton (17.7 tonne) Concept IA-1. Source: GDLSJarret 19.5 ton (17.7 tonne) Concept IA-3. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept II-3. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept II-6. Source: GDLSACEC 19.5 ton (17.7 tonne) Concept III-2. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept III-3. Source: GDLSUnique Mobility 19.5 ton (17.7 tonne) Concept IV-2. Source: GDLSACEC 19.5 ton (17.7 tonne) Concept IV-3. Source: GDLS
Production study
With the ACEC winning out, a production study was conducted as to problems and costs. The 192 hp DC motor in the design was not an issue, as it was already a well established piece of technology. It had already been used experimentally on a Belgian AFV called the ACEC Cobra several years before.
Although the ACEC system had already been used on the Cobra some years beforehand, there were significant differences. The study had selected the 500 hp Cummins VTA-903T whereas the Cobra used the 190 hp Cummins VT 190.
The 417 hp rare-earth metal permanent magnet (PM) generator (a Garrett design) used in the concept study was a problem. The generator required Samarium Cobalt (SmCo – a type of rare-earth magnet), and Inconel (a nickel alloy), an ingredients list which used strategic materials – specifically cobalt, a material which was difficult to work with in manufacturing, as it required special handling to prevent it from being damaged.
The result was that the cost of the drive-system without considering the final drives and cooling was estimated per vehicle at 1985US$19,500 (nearly US$47k in 2020 values) with a projection that the drives for the planned 400 vehicles would cost over 1985US$165,000 (just under US$396,000 in 2020 values).
Alternative Engines
Although the 500 hp Cummins VTA-903T was selected for the purposes of the study, it was accepted that other engines were available. In the end though, other than the possibility of switching to a petrol-turbine, the existing diesel engines were the only technology mature enough to be considered.
Of the 38 possibilities, three systems suitable for the 19.5-ton vehicle were identified. Concept I-5, from the Belgian firm of ACEC, came with the conventional DC (Direct Current) traction motor driven by a permanent magnet AC generator. The second was concept I-10 from the firm of Garrett which used its own AC permanent magnet drive, and finally, from the firm of Unique Mobility was concept IV-2 which used a dual-path AC permanent magnet drive system.
Other systems were considered as showing potential, even though they were not selected. These were the Jarret variable reluctance drive (using a single seed gearbox saving a lot of weight and volume with 84% efficiency) and the Westinghouse DC Homopolar drive (an extremely simple system albeit heavier than the equivalent mechanical system).
ACEC Drive System Detailed
The ACEC drive system consisted of a single 417 hp rare-earth self-excited metal permanent magnet (PM) generator (a Garrett design) operating at 18,000 r.p.m. This oil-cooled generator had an efficiency of 93.5% and a rating of 370 kVA. Connected to the 500 hp Cummins VTA-903T, it required a ratio transfer case operating at a ratio of 6.9:1 to raise the relatively slower rotating speed inside the engine to match that needed by the generator.
This sounded simple enough but the output from the generator was 3-Phase Alternating Current (AC) and had to be rectified into Direct Current for the ACEC motors. This was done using an oil-cooled 6 thyristor rectifier bridge allowing for bi-directional power flow and also for close control over the voltages. Operating at 747 Volts DC, this rectifier was 98% efficient.
ACEC DC traction motor as used on the ACEC Cobra. Source: Janes
The pair of ACEC DC traction motors were air-cooled and each rated at 192 hp, although they could deliver up to 300% of that capacity for up to 20 seconds. These were more than just drive motors too, as they also operated in the manner of generators when run with the field excitation voltage reversed, which allowed for steering and braking with the power generated fed back into the system and adding to the power of the generator. The motors were very compact too, just 2.35 cu.ft. (0.07 m3) each, with a diameter of 430 mm, length of just 460 mm, and a weight of just 700 lbs. (317.5 kg). Operating at 1,887 r.p.m. the motors could work at a maximum of 5,660 r.p.m. (for 20 seconds) operating at 420 Volts DC and with 93% efficiency over a 3 to 1-speed range.
These motors, on their own, were insufficient to provide all the power required to meet the desired road speed of 45 mph (72.4 km/h), so a two-speed 3:1 ratio oil-cooled gearbox was added with a constant mesh gear and clutch system of a type similar to that used in the X-1000 series transmission on the M1 Abrams.
The final element in the drivetrain was the 4:1 reduction ratio heavy-duty planetary drive coupled to the drive sprocket. For the ACEC-system vehicle, a maximum heat rejection of 3,677 BTU/Min (3,879 KJ/ Min) was needed.
ACEC Concept I-5 for the 19.5 ton (17.7 tonne) electric drive vehicle. Source: GDLS
Garrett Drive System Detailed
The Garrett system (I-10) consisted of a permanent magnet AC traction motor rated at 444 hp, also with a 2-speed gearbox and final drives. The AC generator itself was an oil-cooled unit of Garrett design using the rare-earth magnets to supply the field flux and operating at 747 Volts RMS at 18,000 r.p.m. with an efficiency of 93.5 %. As with the ACEC system, a ratio transfer case operating at a ratio of 6.9:1 was needed to raise the relatively slower rotating speed inside the 500 hp Cummins VTA-903T engine to match that needed by the generator.
Garrett Concept I-10 for the 19.5 ton (17.7 tonnes) electric drive vehicle. Source: GDLS
The system from Garrett added an oil-cooled rectifier to provide feedback to the control system for the driver for the steering and braking of the vehicle. Operating at 747 Volts DC, this unit worked at 98% efficiency. This system was connected to a pair of 192 hp traction motors. Operating at 4,600 rpm, these oil-cooled motors, like the motors from ACEC, were capable of operating at up to 300% capacity and running at 18,500 rpm for up to 20 seconds.
The AC traction motors delivered speed across a 4 to 1-speed range but once more, like the ACEC system, was insufficient on its own to provide the necessary top speed desired. This system too was therefore also supplemented by an oil-cooled 2-speed gearbox, once more using a similar gear meshing and clutch system as used on the X-1000 series transmission of the M1 Abrams. Finally, the Garrett system used a 4:1 reduction ratio heavy-duty planetary gear driven by the output from the 2-speed gearbox to move the sprockets.
Cooling was an important factor in all of the system and calculations for the Garrett systems (both I-10 for the 19.5 ton and I-3 for the 40-ton) were calculated. For the 19.5 ton (17.7 tonnes) vehicle, a maximum heat rejection of 4,565 BTU/Min (4,816 KJ/ Min) was needed.
Unique Mobility Drive System Detailed
The drive system from Unique Mobility (UM) was different from the other systems in that it used two different paths for the delivery of automotive power, one mechanical and one electrical. The electrical system alone delivered power for speeds from 0 to 15 mph (24 km/h) and, when more power was needed to go above that, the mechanical system was unlocked and coupled to the electrical system. The control unit then controlled the power between these two units.
The electrical power was provided by a permanent magnet AC generator driven by the engine rectified to DC and then inverted in order to provide power to the traction motors. The generator was an oil-cooled Garrett-type rated at 400 hp and rotated at 18,000 rpm with 93.5% efficiency. The oil-cooled rectifier for this system operated at 685 Volts DC at 98% efficiency and connected to a 284 Volt AC inverter operating at 96% efficiency.
The traction motors used rare-earth metal magnets made from neodymium which removed the problem of the cobalt-type magnets, as the US had adequate stocks of neodymium. The cost of 400 of these power units was estimated to be 1985 US$145,000 (just under US$350,000 in 2020 values). The Garrett traction motors delivered 192 hp each and were able to operate at 200% for up to 30 seconds and deliver power to the final drive units which operated at a 4:1 reduction ratio.
Concept IV-2 from Unique Mobility. Source: GDLS
Conclusion
Switching to an electrical transmission from a mechanical one could have provided several key benefits. It was more efficient, produced less heat through friction, and took up less than half the volume of the mechanical system. Half the volume meant more space available inside for fuel, weapons, and men, or just a smaller vehicle which therefore needed less armor and could be lighter.
With the transmission decoupled from the location of the engine and no drive shafts needed, the designers for the vehicle were free to make some radical layout changes if they wanted. This they did not do for this concept, as the layout remained rather ordinary. It is perhaps that which was the biggest failing of the study, as the vehicle shape and size were dictated from the start, meaning the single biggest freedom provided to the designers was gone. Instead, electric drive could only compete in terms of weight and volume and perhaps it was this ‘dictating the terms of the contest’ which was the main factor in why it was not adopted.
By working their way through the possible vehicle power options, the concept study team had made a clear choice. A relatively small diesel engine and the ACEC DC system were the most efficient and effective e-drive options for a new generation of vehicles in the 19.5-ton (17.7 tonnes) class.
Despite this, however, the idea was destined for obsolescence by the conventional diesel engine and mechanical powertrain on the M2 Bradley. The Belgians had made their ACEC motor-powered APC and even a light tank on the platform, but this American project fizzled out and more than 30 years later the idea of a diesel electric-powered APC has yet to be exploited to its full potential.
Side profile of the EDFCV. While the outside layout of the vehicle was quite interesting, the heart of the project lay within: The hybrid drive. Illustration by Rhictor Valkiri, funded by our Patreon campaign.3/4 view of the EDFCV, showing the impressive armament and optics. Illustration by Rhictor Valkiri, funded by our Patreon campaign.
Specifications 19.5 ton (17.7 tonne) Concept
Dimensions (L-W-H)
246” (6.25 m) overall, 92.52” (2.35 m) from front wheel to rear (centers) x 110” (2.79 m) x 72” (1.83 m) hull, 96” (2.44 m) overall
Tracks
17.52” (0.45 m) wide, 150” (3.81 m) length ground contact
Total weight
19.5 tons (17.7 tonnes)
Crew
??
Propulsion
500 hp Cummins VTA-903T with electric drive
Speed
5 mph (8 km/h) to 45 mph (72.4 km/h)
Armament
Single 0.50 calibre (12.7 mm) heavy machine gun with 1,000 rounds, pair of twin Dragon ATGM launchers with 4 spare missiles
Sources
GDLS. (1987). Electric Drive Study Final Report – Contract DAAE07-84-C-RO16. US Army Tank Automotive Command Research, Development and Engineering Center, Michigan, USA
DiSante, P. Paschen, J. (2003). Hybrid Drive Partnerships Keep the Army on the Right Road. RDECOM Magazine June 2003
Khalil, G. (2011). TARDEC Hybrid Electric Technology Program. TARDEC
United States of America (1979-1983)
Self-Propelled Gun – None Built
FMC HIP design. Source: Janes
The SPG deficit
The United States had, by the 1970s, realized that the majority of their artillery was aging rapidly or just out of date. Open topped, slow, vulnerable, based on obsolete chassis, the existing self-propelled guns (SPG’s) in service were not suitable for a potential Cold War showdown with the Soviet Union, which had a more modern SPG force. Early development work took place under the program names Division Support Weapon System (DSWS) and Direct Support Armored Cannon System (DSACS). The DSWS had changed by 1979 into the Enhanced Self-Propelled Weapons System (ESPWS) program with the goal of producing a common platform for self-propelled artillery for the Army.
All of these programs were also grouped under the general name of the Howitzer Improvement Program (HIP). This development was to take multiple strands. One was work commissioned from the firm of Norden to study improvements to the existing M109 fleet as well as an examination of foreign systems in use or development. This included the French GCT and the multinational SP-70 project. The M109, a system developed in the 1950s and first fielded in 1963, was a prime candidate for upgrading or replacement. In 1980, the replacement for the M109, incorporating elements of the other programs, was underway and after 3 years of work several alternatives for replacement or modernization of the M109 had been evaluated as part of the Howitzer Improvement Program known as HIP.
HIP outline
With the multitude of acronyms involved before work had even begun, it is easy to become confused, but the HIP program laid general principles a future system would have to meet to be acceptable. Firstly and most importantly, the caliber was defined. It had to be a 155 mm gun with a barrel length not less than 38 calibers long (5.89 m) and not longer than 50 calibers (7.75m) capable of firing standard 155 mm shells to 25 km. HERA – High Explosive Rocket-Assisted – ammunition would be available in order to extend this range to 30 km. Shells would be loaded by means of an automatic loader system reducing the crew down to a nominal 4 with some optimism that it could be reduced to 3 and operated in an emergency by just 2 men.
Not less than 50 rounds were to be carried with a target of up to 75 shells which, working with the automatic loading system, could deliver between 8 and 12 rounds per minute. If the automatic loading system was omitted and a manual system retained, then the rate of fire would drop to just 4 rounds per minute, as well as impacting the number of crew required to operate the gun. The alternative consideration was a ‘halfway house’ of a semi-automatic system rather than manual or fully automatic with an estimated rate of fire of between 4 and 8 rounds per minute. The desire was for a state of the art system to meet the RAM (Reliability, Availability, Maintainability) requirements with computer-controlled and monitored systems. Fire control was to be by means of an onboard ballistic computer and computer-controlled gun motors. This combination allowed the system to fire, relocate to avoid counter-battery fire, and then fire again in under 1 minute. The ability to avoid enemy counter-battery fire was a significant improvement and step forward.
Protection was to be just of an ‘improved’ type over what (presumably) there already was in comparison on the M109 and the vehicle had to have an NBC overpressure system fitted as standard. A further note was that for self-defense the vehicle would be provided with a single .50 caliber heavy machine gun on the commander’s cupola. For mobility, the HIP required a new powerful engine capable of delivering not less than 20 horsepower per ton capable of propelling the various vehicles based on this chassis to a road speed of 60-75 km/h, to a maximum operational range of between 400 and 600 km. All vehicles had to be capable of transportation via a C-130 transport aircraft.
HIP Chassis family
Each SPG would have an associated and dedicated Ammunition Resupply Vehicles (ARV) with between 80 and 150 additional rounds of ammunition. This vehicle was to be based on the same chassis as the SPG itself, with a crew of 3 or 4 and the same level of protection.
Another vehicle would be the Battery Operations Center (BOC) also based on the chassis with a crew of 7 (in two shifts) and an Armored Maintenance Vehicle (AMV) with a crew of 2 (and 4 mechanics). Each AMV would carry spares, tools, and even a complete spare power pack for the chassis. The vehicles were to be assigned to a battery at the rate of one AMV per battery.
A battery would therefore consist of 3 SPG’s, 3 ARV’s, 1 BOC and 1 AMV for a total of 3 guns, up to 675 x 155mm shells, and between 28 and 45 men.
HIP was to be an integrated part of all Army divisions replacing the vehicles already in service at a rate of one battalion to each Army brigade Battalion makeup for the HIP program. Source: Author
The FMC Proposal New Start
By 1984, FMC (Food Machinery Corporation) had made their own proposal to meet the demands of the HIP program as specified under the name ‘DSWS New Start.’ The basic arrangement of the proposal was an unusual-looking vehicle with a completely fixed superstructure on the rear of the chassis. The engine was mounted in the front and the ammunition (in drums) sat at the top rear of the casemate. The 155 mm gun mounted into this superstructure was not completely fixed and had the ability to move up to 5 degrees left or right. The driver sat forwards of the casemate, in a raised structure that extended back along the hull into the casemate. This would permit him to come back into the fighting space rather than be isolated in the driving position. The chassis itself was mounted on 7 road wheels with 4 return rollers and drive to the tracks delivered by a front-mounted sprocket. Power would be provided by an unspecified 700 hp engine.
Armament
The requirement was for a 155 mm gun 38 to 50 calibers long and FMC’s design was for a 45 caliber weapon which was under development at Watervliet Arsenal. The range required was 25km (30km with rocket assistance) but this FMC proposal gave the maximum range with standard (non-rocket-assisted) projectiles as 23km.
Shells would be delivered via a fully automatic system feeding from two large drums containing a maximum of 50 rounds divided equally, with one drum on each side of the breach. Fifty shells were the minimum required by the program but this FMC proposal could fulfill the other needs for full automation including fuze setting which was incorporated into the breach and was fully compatible with the existing 1 to 8 zone bag charge propellant system or the then newly proposed 5-zone modular propellant. Shells would be reloaded via the Ammunition Resupply Vehicle via two large hatches in the rear of the gun.
The end of the new start
The DSWS project was canceled by 1983. It was seen as being too expensive and too complicated. The focus would instead be on modernizing the existing M109 fleet and the HIP project would roll on sucking in more cash. For their part, FMC had produced a capable design whose biggest flaw was probably not the cost but the lack of a turret. They had met almost all of the requirements set by HIP and would try their hand at the M109 modernization instead, rolling much of their development work into a new M109.
Conclusion
Like many of these multi-year huge contracts in the US, this one is an enormous project of overlapping requirements. The HIP program didn’t end with the cancellation of the FMC DSWS New Start concept, it was still going on into 1991. This was the date by which the vehicles were meant to have been entering service yet development hadn’t even finished and only 8 prototype improved vehicles had even been made by 1989. The project was simply too large and phenomenally expensive. In 1989 alone, for example, the HIP program cost nearly US$28.5million and nearly US$10.5million the following year. It didn’t matter anyway for FMC. All work on a complete replacement for their project was terminated by 1984 with the decision being made at the time to simply modify the M109 fleet with new ammunition stowage and a longer range gun instead. The project was overall somewhat of a failure, no new vehicle was produced and a huge amount of money was spent. The opportunity for a new and more capable platform producing a new family of vehicles was lost.
Illustration of the FCM New Start Howitzer Improvement Program, showing the forward placed driver compartment connected to the rear fixed superstructure. Illustration by Yuvnashva Sharma, funded by our Patreon campaign.
Specifications required for Future Self-Propelled Artillery System
Propulsion
Advanced new engine delivering at least 20 hp/t
Top speed
60 to 75kmh (road)
Operational maximum range
400-600km
Armament
155 L38 to L/50 main gun, one cupola mounted .50 cal heavy machine gun
Ammunition
All current and future compatible NATO 155mm shells, modular combustible case shells as well as guided, unguided and rocket-assisted shells.
Armor
Unspecified ‘improved’ armor
FMC proposal ‘DSWS New Start’
Armament
155 L45 main gun, one cupola mounted .50 cal heavy machine gun
Ammunition
50 rounds in two 25 round drums with fully automatic feed capable of firing unassisted projectiles to 23km
Sources
GAO Report AD-A141 422 M109 to M109A5 Report, March 26th 1984 Janes Armour and Artillery 1984-5
US Army Tank Automotive Command Laboratory Posture Report FY 1982, US Army
Research Development and Evaluation Army Appropriation descriptive summaries, January 1990, US Army Congressional Report
Report ARLCD-CR-81053, Demonstration Prototype Automated Ammunition and Handling System for 155mm Self-Propelled Howitzer Test Bed, December 1981, US Army ARRADCOM
United States of America (1966)
Research Vehicle – 1 Built
Ideas about coupling vehicles together and of an articulated body for fighting vehicles are as old as tanks themselves. Coupling two vehicles together offers the designer some significant benefits for mobility and design for a variety of roles, one of which was with amphibian tanks.
Unladen LVTP-5 in the water showing her trim line, later a coupled LVTP-5 was attempted. Source: Dyck and Ehrlich
Amphibian tanks, which can operate on land or in water, have unique challenges to overcome. They have to be buoyant enough to float and yet armored sufficiently to protect the troops and then they still have to deal with the difficult transition from water to land. A coupled or articulated vehicle has the advantage of being long enough to straddle this boundary between water and land and potentially, of being able to cross bigger obstacles than a single-hulled vehicle.
With that in mind, the US Navy started work as early as 1966 studying the effects, benefits, and costs associated with coupling amphibian vehicles together. That study followed work between 1956 and 1958 focusing solely on improving water speeds for amphibian vehicles although due to time and financial constraints it was limited only to wheeled vehicles. Although those tests were inconclusive the one bright light from them was the testing of the ‘Sea-Serpent’ (not to be confused with the amphibian flame-thrower vehicle of the same name). Sea-Serpent was the name given to a multi-vehicle amphibian train of up to eight vehicles coupled together which managed a combined speed double that of one of the single vehicles.
Artwork for the ‘Sea-Serpent’ a series on coupled amphibians and the simple pin connection between the trucks. Source: Nuttall and Kamm.
Building on this finding for such a novel vehicle, in 1966, Davidson Laboratory (DL) looked at the problem from the point of view of tracked amphibians and concluded that it was feasible to couple together up to five LVTP-5s and that this ‘amphibian-train’ had only twice the water friction of a single vehicle. As such, this 5 vehicle train could increase speed by up to 50% in the water alone. Furthermore, the transition zone was traversed more easily by this 5 vehicle train, as were obstacles. Such an increase in mobility constituted a significant military advantage and clearly this success meant there would be further work in this area to expand on this.
The DL experiments did not use actual LVTP-5 but instead accurately shaped and weighed models in a test tank with them connected together by means of simple pin connections at the height of the center-of-gravity (CoG) of the vehicles.
One problem identified during these 1966 tests was that the increased vehicle speed produced an increased sized bow-wave with a consequent increased risk of swamping of the lead vehicle (as there is no bow wave for any of the following vehicles). To counter this, a freeboard shield would be required to be fitted to the lead vehicle of any LVTP-5 train regardless of length (Tests conducted during the 1970’s with coupledM113s also showed this additional freeboard shielding used). Additionally, as a larger freeboard shield was required for any length of LVTP-5 train, it was also found this had the side benefit of itself reducing drag in the water by 5%. In calm water, it required zero freeboard at 7.1 mph (11.4 km/h) and 12 inches (305 mm) at 7.6 mph (12.2 km/h). At 8.3 mph (13.4 km/h) however, she would need 20 inches (508 mm) of freeboard – the same amount as required unladen at 10 mph (16.1 km/h).
Schematics of the 1/12 scale model used for the coupled LVTP5 trials showing the size of the additional freeboard protection required. Source: Dyck and Ehrlich
Spacing
Vehicles used in an amphibian train had to be carefully positioned to reduce drag and the ideal gap between vehicles was found to be 1 foot (300 mm) compared to the original 6 feet (1.8m). This close-coupling reduced drag in the water by 15% and thereafter all testing was done with little or no gap between vehicles. Even with the drag reductions and freeboard changes though, the entire train was still effectively limited to a safe speed of 9.2 mph (14.8 km/h) in the water to provide a margin of safety for rough water.
Additionally for rough water the coupling, DL recommended that it “must be capable of absorbing some degree of shock, if wave or surf operation is contemplated”. They had found that, at a pitch angle of more than 25 degrees, their train broke apart. Obviously, in a real-world situation, this would have proven extremely hazardous.
The 1966 experiments ended with strong recommendations to pursue this modeling to the prototype stage with a train made from real LVTP-5 tested with a view to developing an effective type of coupling and box shields. It is not known, however, if any LVTP-5’s were ever modified in tested in this coupled configuration despite the potential benefits.
M113 CCRV project during snow trials. The vehicle could be controlled from either front or rear vehicle. Source: TACOM/TARDEC
A Project Reborn
The work in 1966 had shown the potential for coupling for amphibians but also highlighted the lack of knowledge in coupled-vehicle systems. As a result, in 1972, money was put aside by Congress for work on cybernetically coupled technologies with positive feedback controls to tray and leverage this coupling technology. The following year (1973), two M113’s were modified and coupled together to form the M226 Cybernetically Coupled Research Vehicle (CCRV). That work showed, once more, great potential. Combined, the two vehicles exhibited greater mobility off-road than an individual vehicle, particularly when it came to obstacle crossing, and used a more controlled system for the coupling compared to the rather crude pin-attachment in the 1966 experiments. This time, instead of an uncontrolled pin vulnerable to excess pitch (in the water) and excess yaw (on land or in the water), the M113 CCRV connector limited movement to a maximum articulation of +/-45 degrees and a yaw of +/-30 degrees.
Control for the system was by means of a simple joystick with positive feedback in all cases, except for pitching where the feedback caused some problems. A simple movement of the driver’s joystick would control the hydraulic arms on top of the vehicle to move the two hulls relative to each other as well as providing stiffness preventing too much pitch and yaw.
The conclusion of the trials in 1974 had proven the experiments in 1966 to be partially correct. A coupled vehicle did exhibit manoeuvrability benefits over the single hull system. Some specific recommendations and findings about the coupled-vehicle system came out of the project including the reduction of water resistance for amphibious vehicles and assisting amphibious assault vehicles in breaching defences.
LVTP-7’s
Irmin Kamm, from the Stevens Institute of Technology and one of the lead authors for TACOM on cybernetically coupled vehicles had already worked on amphibian trains coming up with the Sea-Serpent back in 1969 and then, on the M113 CCRV project. He continued his work on the coupled-vehicle concept with amphibians in 1979 with an evaluation of the concept of a ‘Coupled-LVT’ (LVT – Landing Vehicle Tracked). He was clearly advocating for more work in this area as, in 1979, he concluded that study saying “the advantages [of a coupled vehicle] exceed the drawbacks, it is recommended that existing vehicles be coupled and tested to establish their operational capacity”. The end-user was being clearly identified as the US Marine Corps just like before but the requirements had changed a little. Instead of a coupling permitting +/-45 degrees and a yaw of +/-30 degrees as on the M113 CCRV, this coupled LVTP would have a maximum pitch of just +/- 30 degrees.
Instead of the A-frame drawbar connected to a ball and two hydraulic actuators, this time, the system would be simpler. That older system had to be connected manually but with a new cone-into-cone system, the vehicles could connect or detach on sea or land without having to stop and get out. Each vehicle would simply have a ‘male’ convex cone on the front and a ‘female’ concave cone on the rear, with both located at the center of gravity line. This system was much more versatile. Instead of a master-and-slave unit, as with the M113 CCRV, this time any vehicle so equipped with a coupling cone could connect to any other on sea or land adding a new level of capability to the idea.
Just as before, control over pitch and yaw was performed by either lead or following vehicle by means of a joystick (although a steering wheel was also considered in the study) and the engines would be synchronized to produce the same output. Transmission and braking was to be changed manually though.
With two LVTP-7’s coupled together in this system, the expected performance increases were impressive at a price of additional weight of controls and fittings and a reduction in the internal space in each vehicle. Another note was that the coupled vehicles presented a slightly larger target to enemy fire although from the front the area exposed would obviously be the same. Coupled together, the vehicle would also get a new name. It was to be the LVTP-77.
..
Articulated LVT
The name ‘LVTP-77’ appears here for the first time as it is two LVTP-7’s coupled together and rather than sum the two 7’s to make LVTP-14, akin to what was done adding together the ‘113’ part of the two M113’s which were coupled forming the M226, here they simply added a second ‘7’ to make LVTP-77. Looking at the figures for the LVTP-77, they clearly demonstrate that the coupled amphibian is more stable and faster in water, and in fact, faster on land too, with better obstacle crossing, but there was one other concept investigated by Kamm as an alternative. This was an articulated vehicle made from multiple-units comprising a single vehicle rather than two or more vehicles combining.
This articulated vehicle would have two sections of 14 feet (4.27m) and 19 feet (5.80 m) respectively fore and aft with a single 890 gross horsepower engine and weighing 54,000lbs (24.5 tonnes). The fore-section contained the engine and transmission and the rear section contained all of the crew, and an auxiliary engine.
.
The 1979 study had concluded that a coupled amphibian was not only possible and beneficial but also desirable, as was an articulated LVT. The recommendation going forwards was to design, install and test a suitable coupling on either a pair of LVTP-7’s or LVTPX-12 vehicles.
Coupling the LVTP’s
With the M226 CCRV, it was simple. It was just a test rig so it did not really matter if the combat capabilities, such as the troop space, were severely hampered. For the actual project with LVTP-7’s or others, the rear ramp and emergency exits had to be kept clear, as would the cargo hatch. Unlike the M226 CCRV, the coupling had to be remotely connectable and disconnectable on land or water and each vehicle had to be able to operate as either the master or the slave. For an articulated LVT, the vehicle was to be limited to 33’ (10.06 m) and had to be equipped with a rear exit ramp and top cargo hatch. The restriction of just one driver was not a problem, but the articulated vehicle was also supposed to be able to dump one part of itself and be able to operate independently on land if needs be. Hence, the reason for the auxiliary engine in the aft unit of the articulated LVT design.
There were 12 separate coupling systems suggested for the coupled LVTP, but only a single viable design for the articulated LVT. The types of connections considered were ball joint, off-center ball joint, symmetrical yaw, symmetrical yaw with independent pitch control, dependent pitch and yaw, dependent pitch and yaw with coupling frame, yaw – no roll, pitch only, turntable, trunnion mount, trunnion mount- internal coupler, and, split pitch and yaw. Only the split pitch and yaw type was suitable for both remote coupling and further development.
The articulated LVT was perhaps more promising as it did not need to concern itself with the problems of remote coupling. In keeping with articulated and coupled vehicles though, the turning radius was large, 35’ (10.7 m), over twice as big as a single LVTP-7 but substantially less than either the coupled M113CCRV or the LVTP-77.
All of the pitch and yaw controls were completely contained within the vehicle with steering by the simple means of yaw control from the driver. The front unit’s 850 ghp engine would be supplemented by a 100 hp auxiliary engine in the back providing some very limited mobility in the absence of the lead unit or if it became damaged by enemy fire. In the normal situation though, this 100 hp engine was used only for driving the pumps for moving the actuators for the coupling.
Power in the water was to be provided by water jets enclosed in the fore sections powered from the main engine. Although it would be more efficient in water-drive terms to have them in the rear section, it was a more efficient use of weight and space to have them in the front. Steering in the water was by means of water deflectors in the jets which moved in conjunction with the yaw of the vehicle for efficient steering. The articulated vehicle would only need one driver who was required to be in the rear although was ideally to be in the front section for visibility. The coupled vehicle concept, on the other hand, would require a driver in both sections to ensure smooth operation and obviously would not need to couple up remotely. In an emergency, it could decouple from the front unit by means of an explosive bolt – in this was the driver did not have to get out at all.
Having conducted various analytical work on the concepts for arrangements of the LVTP-7 and LVTPX-12 models, trials were carried out and once more confirmed the efficiency of coupling an amphibian. Unlike the coupled LVTP-5, which does not appear to have gone further than the concept stage, there was work carried out between 1979 and 1980 on the LVTP-7 project.
The Articulated LVT
The other part of the project which seems to have gained no traction was the Articulated LVT. Despite being better in many regards than the M226 and LVTP-77, simpler, no remote coupling or uncoupling, a single driver, etc., the project simply did not get anywhere yet was a fairly straightforward design. Two sections, engine at the front with the crew at the back, it could pitch through +/- 30 degrees and yaw to +/-34 degrees. Two small turrets on the aft portion contained cupolas for the commander and driver with the secondary weapon (unspecified but likely a .50 caliber machine-gun) in the commander’s turret. The troop compartment behind this was large with enough space for 6-8 Marines provided with a large rear ramp. The front section allowed the vehicle to climb obstacles the LVTP-7 could not and propel it through the water just as well as the LVTP too. An added advantage was that this fore-section would also be the first part coming out of the water to draw enemy fire but, being completely unmanned, did not matter. Instead, it actually served to provide substantial protection for the aft section and in the event of the fore section being damaged the auxiliary engine could simply move the vehicle forward and use the fore section as a large shield until it could be discarded. No armor is actually specified anywhere in the design, but it is a reasonable assumption to assign values comparable to the LVTP-7.
Drawings of the proposed Articulated LVT. Source: Kamm and Nazalwicz
Floating in the water, the fore section with the water jets tilted upwards sharply directing the water jets down whilst the main vehicle was relatively level behind it. Poking out just above the water from this fore section was another weapon, remotely operated and forming the primary weapon for the design specified only as an ‘automatic weapon’.
Drawings of the proposed Articulated LVT. Source: Kamm and Nazalwicz
Putting the LVTP-77 Concept Into Reality
Tests took place at the USMC camp, Camp Lejeune, North Carolina in 1979 and 1980 with LVTP-7 being tested firstly with three new designs of bow planes to cope with the anticipated larger bow wave. These new bow planes were 54” (1,372 mm) long, 42” (1067 mm) long, and 42” (1,067 mm) with a 6” (152.4 mm) lip. The vehicles were tested for speed at Courthouse Bay and at the Battalion Maintenance Pier followed by open water tests in the open ocean off Onslow Beach, all at Camp Lejeune, compared to an unmodified vehicle and a ‘jury-rigged’ coupling between two LVTP-7s.
Arrangements of the experimental bow planes tested on LVTP7s at Camp Lejeune 1979-1980. Source: Kamm and Nazalwicz
The results showed that the increased bow planes did not directly affect speed by reducing drag, but did reduce swamping which allowed for a small increase in speed. Regardless, however, the coupled LVTP-77 was faster by about 0.5 mph (0.8 km/h) in all conditions even without a bow plane and the method of coupling was inadequate with the vehicles too far (about 24 inches / 610 mm) apart, something known to increase drag. Had the coupling been properly constructed and fitted no doubt further improvement could have been made.
Experimental coupling tested at Camp Lejeune for two LVTP7’s. Source: Kamm and NazalwiczVery poor quality image showing the two LVTP-7’s coupled together during open water testing. Source: Kamm and Nazalwicz
The tests concluded that a new bow plane should be designed and made for the LVTP-7A1 to reduce the swamping experienced at even 6.5mph in calm waters and further work should be done on the coupled LVTP idea. The gap between the vehicles was going to be a problem though, the requirement for the ramp to still lower guaranteed the vehicles had to be too far apart to make complete use of the extra efficiency when in the water.
Either way, the coupled LVTP7 idea was dropped. The benefits were obvious, but simply did not outweigh some of the associated problems and the money to develop the system was not available. As a result, the whole project was terminated. It is assumed that the two LVTP-7’s modified with the coupling were simply returned to USMC service straight after the trials. The articulated LVT was even less successful. Despite being the logical solution to the coupling development, it never got past the proposal stage. The LVTP-7 was serviceable and available and budgets, seemingly, were better spent elsewhere rather than on a relatively small improvement to an existing vehicle.
Illustration of the LVTP-77 Cybernetically Coupled Amphibian produced by Tank Encyclopedia’s own David Bocquelet
Specifications (LVTP-77)
Total weight, battle ready
103,968lbs (47.2 tonnes) to 106,500lbs (48.3 tonnes)
Crew
Minimum 1 (driver), ideally 2 (one in each vehicle)
Specifications (Articulated LVT)
Dimensions
33 ft x 14 ft x 19 ft (10.06m x 4.27 x 5.79 meters)
main engine LCR-V903 890hp, auxiliary engine 100hp
Armament
primary automatic weapon in fore section controlled remotely, secondary weapon on commander’s turret on aft section
Sources
Cybernetically Coupled Research Vehicle. (1974). Ronald Beck and Irmin Kamm, Stevens Institute of Technology, USA
50 years of the International Society for Terrain-Vehicle Systems: Ground Vehicle Mobility, Modeling and Simulation ar TACOM-TARDEC ‘A Brief History’ (2012). Dr. Peter Kiss and Dr. Sally Shoop Editors. International Society for Terrain-Vehicle Systems, Germany
The Water Performance of Single and Coupled LVTP7’s, with and without bow plane extensions. (1980). Irmin Kamm and Jan Nazalwicz. Ship Research and Development Center, Office of Naval Research, Department of the Navy.
Drag Studies of Coupled Amphibians. (1966). R.L. Van Dyck and I. R. Ehrlich. Office of Naval Research, Department of the Navy.
Department of Defense Appropriations for Fiscal Year 1973. (1973). United States Congress Appropriations Committee
Analysis of Obstacle Negotiation by Articulated Tracked Vehicles: The State of the Art. (1981). Peter Brady. Naval ship Research and Development Center, Office of Naval Research
High Speed Wheeled Amphibian: A Concept Study. (1969). C. J. Nuttall and Irmin Kamm. Davidson Laboratory, Stevens Institute of Technology, USA
An Evaluation of the Coupled LVT Concept. (1979). Irmin Kamm, Peter Brown, and Peter Brady. David Taylor Naval Ship Research and Development Center, Stevens Institute of Technology, USA
United States of America (1983-1992)
Infantry Fighting Vehicle – 1 Turret & Hull Built
The pressure on armored vehicle designers to keep down weight without compromising protection or performance is great. Much focus has been made on moving away from traditional steel armor to aluminium or even titanium and ceramics as an alternative. Whilst these can improve weight without reducing protection, they come with an often very steep price tag as well as other problems. One idea from the early 1980s was the possibility of using a new generation of fiber-reinforced plastics to form the hull of armored fighting vehicles, which led to the creation of a composite bodyM113 Armoured Personnel Carrier (APC). Whilst the M113 was already obsolete and being replaced with the M2 Bradley Infantry Fighting Vehicle (BIFV), the glass fiber composite technology had shown the potential of not just reducing weight of the new APC but also of increasing protection at the same time. The composite used on the M113 was rather basic and would be improved with the first generation of integrated ceramics to provide improved ballistic protection.
Composite-hulled M2 Bradley Infantry Fighting Vehicle with non-composite turret. Source: Pilato and Michno
At the same time, Food Machinery Corporation (FMC) of San Jose, California, the parent firm for the M113, undertook the development of a composite turret for the Bradley with the project starting in 1983, manufacturing 5 turrets by the middle of 1987. Unlike the ‘double sandwich’ of the hull used on the M113, this turret composite was a single layer of polyester bonded S-glass. Overall, the turret was identical in shape and layout to the standard M2 Bradley turret except that it was made in two halves with the resin impregnated glass fiber cloth and then joined together with a metal frame. Making the turret out of S-2 glass fiber/polyester resin composite saved 15% over the weight of the original turret structure with similar levels of ballistic protection. This turret design was then sent for firing trials at Camp Roberts, California, in Autumn 1986. These appear to have been successful, as, by September that year, FMC was awarded a further contract from the US Army Materials Technology Laboratory (M.T.L.), Watertown, Massachusettes to develop this idea further with a composite hull for the entire vehicle.
This hull is referred to technically as Glass Reinforced Polyester (GRP) hull, but often shortened simply to ‘plastic’. The structure of this vehicle was essentially the same as that of the composite turret, consisting of just a polyester bonded S-2 glass fiber, and fabricated in two halves (with the floor panel as a single piece rather than having a seam) which were then joined together using an aluminium alloy frame. Unlike the early tests of the composite M113, this was simpler to produce, lacking the ‘sandwiching’ of the earlier trials. Metal was not eliminated completely either from the prototype, as the turret ring remained metal, as did many of the fittings and the whole rear ramp arrangement. The aluminium frame providing the stiffness for the hull and to which the halves were attached also served as the attachment point for the suspension arms. The hull construction consisted of a floor deck and two side panels, each 2.4m x 6.7m fabricated from plies of S-2 glass fiber in polyester resin ranging from 22 to 69 plies thick. After fabrication and post-manufacture finishing, each panel weighed just 820 kg, a saving of 25% over the original metal structural panels. Work on the composite turret would be less successful and indicate that switching out just the aluminium-armour parts for composites could result in a weight saving of 15.5%.
The fabricated hull showing the composite construction. Source: Army Research Development and Acquisition Bulletin, 1990
Unlike the marginal improvements with the M113 composite hull, the weight saving for the Bradley composite was large, 27% lighter than the standard hull, even with the additional ceramic exterior tiles as applique armor.
Just like the turret, the hull was tested ballistically too. In terms of protection, it was more resistant against explosive blasts and more resistant to spalling than the standard M2 Bradley. The tests had been successful and significant savings in weight could be made, although the cost of mass production of such hulls, not to mention longevity issues, were still to be addressed. One additional advantage of the plastic hulled vehicle was that it had better thermal properties than the metal hull. It stayed cooler and was less prone to overheating, providing better insulation. On paper at least, it was successful enough that in 1992 a new project was started known as the Composite Armored Vehicle (CAV), intended to develop the technologies needed to produce a range of composite hulled military vehicles. That project was developed by United Defence as the third generation of their program of ceramic composite armor development with the Bradley constituting generation 1 and the M8 AGS, generation 2.
Protection
With the majority of the aluminium hull replaced with the S-2 glass fiber composite, the vehicle had structure but lacked the ballistic protection required to protect against the Russian 14.5 mm round. As a result, the vehicle was designed to take special ceramic tiles bolted to the outside. These tiles were made from TiB2 (titanium diboride), an extremely hard material (1800 Knoop, a hardness test unit for very thin or brittle materials) with a high melting point (2970 Celsius) and high density (4.52 g/cm3). Compared to steel with a density of 7.85g/cm3 and aluminium 5083 armor with a density of just 2.66g/cm3, TiB2 lay half way between the two materials but was more than ten times harder than aluminium (1800 Knoop vs 109 Knoop). These rectangular tiles were overlaid with each other in a ‘brick’ weave pattern.
Tile pattern on side of the BIFV. Source: McCauley et alComposite-hulled M2 Bradley Infantry Fighting Vehicle with non-composite turret. Source: Richard Eshleman
Problems
Ignoring issues with the weight, there was a more fundamental problem with the composite body for the M2 Bradley. Just as was found during the same tests with the composite body for the M113, the new plastic hulls exhibited significant longitudinal twisting during testing. In comparative testing though, the small M113 came out better than the larger M2 Bradley in this regard. When fitted with engine, hatches and equipment etc., it simply showed less twisting along the longitudinal axis. Both designs showed themselves equally good at absorbing vibrations, with the plastic hull better than the metal versions.
Rear view of the testbed vehicle circa 1989. Source: Army Research Development and Acquisition Bulletin, 1990
The completed FMC Composite M2 Bradley Infantry Fighting Vehicle (BIFV) was shown off to 200 assorted military, media, and FMC representatives in June 1989 when it was unveiled by General Louis Wagner, then head of the US Army’s Materiel Command. From this public unveiling, it was taken to Camp Roberts in California for 6,000 miles (9,656 km) testing under real-world conditions. Optimistically at the time, the composite BIFV was seen as being able to deliver a 25% weight saving along with improvements to vibration, noise reduction (10dB), reducing spall, lower radar signature, improved thermal efficiency, improved protection against mines and a 20% saving in the cost of manufacture along with lower life-cycle costs. Certainly, these were very exciting potential benefits and they were, overall, somewhat successful. The composite M2 BIFV never went into production though, the hull could still be improved, the external ceramic tiles were too vulnerable to damage and, as with all composites, the issues of repair and multi-shot resistance were not addressed. Instead, a new project was started in 1992 – the Composite Armored Vehicle (CAV) program. This would require the manufacture of a completely new vehicle as a demonstrator test-bed for composite armors known as the Advanced Technology Demonstrator (ATD) as part of the US Army’s Thrust program. More than one company submitted bids for a new composite hulled vehicle platform for the US Military but the program faded out. The work on proving the technology on the M113 and then on the M2 Bradley was to evolve and find use in the CAV-ATD program, but the Composite M2 was not adopted. The fate of the prototype M2 Composite hull is not known.
Unveiling and examination of the composite hulled Bradley at AUSA. Source: Richard Eshleman’
Illustration of the Composite M2 Bradley modified by Pavel Alexe based on work by David Bocquelet, funded by our Patreon campaign.
Sources
Bradley: A history of American fighting and support vehicles. (1999) R.P. Hunnicutt, Presidio Press
Modal Analysis of the M113 Armored Personnel Carrier Metallic Hull and Composite Hull. (1995). Morris Berman. Army Research Laboratory
Aluminium 5083. (2018). ASM Aerospace Specification Metals Inc.
Ceramic Armor Materials by Design. (2012). James McCauley, Andrew Crowson, William Gooch, A. Rajendran, Stephen Bless, Kathryn Logan, Michael Normandia, Steven Wax. Ceramic Transactions Series No.134
Fourteenth International Conference Proceedings. (1999). American Society of Composites.
Composite Fighting Vehicle ‘Rolled Out’. (1989). Carrick Leavitt. UPI
Army Research, Development and Acquisition Bulletin, January-February 1990
Advanced Composite Materials. (1994). Louis Pilato, Michael Michno, Springer-Verlag, Berlin
United States of America (1964-1982)
Amphibious Landing Vehicle – 15 Built
The United States Marine Corps (USMC) has, as core element of its role, the task of assaulting enemy-held coastlines. In order to fulfill this obligation, they required a form of transport that could get them from the landing ship off the coast to shore quickly and safely. It needed to be fast in the water as it was vulnerable to enemy fire with nowhere to hide and had to protect the occupants to get them onto the beach. It should also be able to deliver supporting firepower to support the Marines in their attack. All that sounds simple enough, but the combination of these demanding requirements was a complex juggling skill to balance the competing requirements.
A Modern Amphibian – 1964
The existing fleet of amphibians dated back to the Second World War and were obsolete. The need of the Marine Corps had not gone away so a new vehicle was needed. As a result the Bureau of Ships (a Department of the Navy) issued a preliminary specification on 23rd January 1964 for an Assault Amphibian Armored Personnel Carrier with a minimum requirement for a forward water speed of 8 mph (12.7 km/h) from tracks or 10 mph (16 km/h) from auxiliary power, a reverse (backing) speed in water for 3.5 mph (6.3 km/h). The vehicle was to carry enough fuel for 7 hours at 8 mph and to manage a forward speed on land of 30 mph (48.3 kmh).
The dimensions of the vehicle were not to exceed 26’ (7.9 m) long, a beam (width) of not more than 10.5’ (3.2 m), and a deck height of 8.5’ or less (2.6 m). Space was important and the inside of the vehicle had to provide a space of at least 14’ (4.3 m) long and 6’ (1.8 m) wide sufficient for a team of 25 marines with field equipment.
Weight was to be kept at a minimum but not at the expense of armor. The LVTPX-12 was to be an amphibious assault vehicle, so the gunner had to have an efficient view, and the protection had to be enough against 99% of 105 mm air burst shrapnel at 50 feet (15.2 m). Armament was to consist of either a 20 mm cannon or 7.62 mm machine gun mounted in a turret. The US Marine Corps followed this 1964 requirement with their own in March of that year for a new Landing Vehicle Tracked (LVT) to replace their LVTP-5’s.
Several ideas for construction were entertained, and the firm of Chrysler was one of them, and was awarded contract number 4777 for their work. Engineers at Chrysler looked afresh at all areas of amphibian vehicle design with work on the project divided into several phases, with Phase 1 running from June 1964 to May 1965. Three specific area required attention for the design: water speed, armor protection, and the transmission.
Planning
Various options for a layout with a single engine were considered including:
Single engine and transmission forward
Single engine and transmission aft
Single engine forward, transmission aft
Single engine aft, transmission forward
Double engines anywhere along the length
Ramp forward concept for the LVTPX-12, which was quickly abandoned. Source: Chrysler Corporation
Although, in theory, the troops could be unloaded through a front opening door, this exposed them to enemy fire, and consequently the choice, following advice from the US Marine Corps, was an engine and transmission forward design allowing the crew to disembark via a power ramp at the rear covered by fire from the vehicle.
Diagrammatic of the twin-engine LVTPX-12 proposal. Source: Chrysler Corporation
A double or dual engine design permitted more flexibility, being able to put the engines anywhere in the vehicle making the trim much easier to manage. The only engine narrow enough to fit was the GM6-71T but each one produced less power than a 12V71T, just 460 hp. A pair of GM6-71T’s though would produce 800 hp which was plenty, but came at a higher price as together they were heavier and were not as efficient.
The only advantage of the dual engines therefore was an ease of control and with that, the idea was dumped. When consideration was given to transmissions, either Mechanical, Hydrostatic, or Electric, only two engines were under consideration: the 12V71T or the 8V71T.
Table showing the different equipment systems that were under consideration.
Modelling
More than 100 separate models of various types and modifications of the design were produced over the course of testing, including models of just the bow and stern respectively to find the optimum shape. A single box shaped model was made of a 5 road wheel layout to which various shaped box and stern sections could be attached for trials. All these various designs meant that the length and exact water-trim level varied each time. Only the width, at 10.3’ (3.14m) remained the same, although the trials were conducted with a ⅕ scale wooden model rather than a full size pickup. Some of the trials also involved a beam reduction of 20% with a much thinner vehicle to see if that would deliver the water speed improvements demanded. The narrow design caused a lot of problems, the wheels had to have very little travel, just 9” (229mm), and the whole wheel and suspension arrangement was much more complex. This also made handling harder and less efficient. There was insufficient width for two propellers, so only a single propeller could be used, which would mean a loss of ground clearance too. The marginal improvements in performance in the water were not worth the compromises required and the idea was dropped.
Side and cross sectional views of the narrow LVTPX-12 concept. 20 % narrower than the standard vehicle. Source: Chrysler CorporationPartial model made for water testing lacking stern and bow. Source: Chrysler Corporation
Testing
Testing of the models was conducted at the Ship Hydrodynamics Laboratory at the University of Michigan, and involved not just the various LVTPX-12 configurations, but also the LVTPX-11, LVTPX-2 and LVTPX-7. The model tests showed that very small scale models gave unreliable results and no model smaller than ⅕ scale should be used for testing. They did however, confirm the final hull shape required and the most efficient method of propulsion in water.
Water Propulsion
Two options for propulsion of the LVTPX-12 were considered; propulsion in water by the tracks alone, and propulsion by other means, such as bow or stern propellers. Additional consideration was given to the use of hydrojets too.
For the tracks driving the vehicle in water, 5 different types of grousers ranging from 1.12” (28.5 mm) to 1.25” (31.8 mm) wide were tested to find the most efficient type.
The grouser tests showed that increasing the height of the grouser without increasing the width did not increase the efficiency of the vehicle in water, as it simply increased the friction instead. Wider grousers, likewise, did not improve performance either, although grouser number one was marginally better than all of the others. It was also found that, just like with the LVTP-5, the space between the hull and return portion of the track had to be as small as possible and blocked or the returning track would rob the forward track of motive power as it was effectively driving the vehicle in the opposite direction. An attempt of the LVTPX12 model to alleviate this with a completely covered side track made the problem even worse; large side plates did not help and neither did cutting holes in them. If a fender was to be used it would have to be small and only on the forward portion of the track and were essential to meet the design speeds wanted.
Precisely the opposite was true using the propellers to drive the vehicle. Even these small front fenders were harmful to water speed. Therefore, the LVTPX-12 would either be a track driven short-front fender design or a non-fendered propeller driven machine.
One peculiar finding was the use of a stern plane. Contrary to a first impression, the addition of a large flat stern plane placed flat along the back of the tracks, full width, actually improved performance in the water even though it actually interrupted the flow of water. The engineers at Chrysler did not know why this was but found that this had first been suggested in 1860 by Arthur Rigg in Great Britain to improve the efficiency of paddle wheels on ships.
Large flat sern plane. Source: Chrysler Corporation
Having looked at the stern plane, the engineers looked at bow vanes and the first attempt involved a design copying that on the LVTP-7. This plane was supposed to prevent submergence of the LVTP-7 at speeds of up to 10 mph, although even in a calm sea the real vehicle struggled to manage 7mph without serious swamping and even less in Sea-State 2 (2 foot waves). The same bow vane fitted toot the LVTPX-12 did not improve performance in the water at all and was actually a hinderance based on a loading of 59,000lbs (26.8 tonnes). The outcome was that a bow plane was pointless and the vehicle was simply better served with a boat shaped bow. Stern shape was even simpler. Because the only bow shape acceptable had to be boat shaped it extended the vehicle to the maximum 26’ (7.92 m), the stern shape could not be boat-shaped. Any angle less than 15 degrees was equally bad and the conclusion was simply to make it square to maximize space instead.
On the question of propellers, the single 27” (686 mm) Kort propeller was found to be highly satisfactory for water propulsion, but caused other problems. It had to be fitted as low as possible for maximum propulsive effort, but it reduced the ground clearance to just 16” (406mm), although a secure stowed position for it was provided. The significant advantage of a single propellor was that it could easily be used for steering the LVTPX-12, but during sharp turns increased the risk of capsize. To solve this capsizing issue, the solution was two propellers with one on each side. Although they would be vulnerable to damage as they projected outside of the width of the vehicle, they would not affect the ground clearance and even should both fail the vehicle would use its tracks to manage 6mph. Controllable steering for a twin propeller design would necessitate the use of controllable pitch propellers.
Rear view of LVTP12 designs with single 27” (686mm) Kort propeller. 26” (660mm) versions were also tested. Source: Chrysler CorporationDouble 29” (737mm) Kort propellers in the open and stowed positions seen from the rear. Source: Chrysler Corporation
A better form of steering for the LVTPX-12 was by means of electrically driven 7.5” (191 mm) diameter hydrojets fitted within the sponsons of the machine. These small hydrojets extended just 39” (991mm) along the inside of the sponson weighing just 87 lbs (39.5kg) each.
LVTPX-12 with the rear ramp and hydrojet positions at the bottom of the hull. Space for 26 men and three crew provided. Source: Chrysler Corporation
It was recommended, however, that later some kind of reactive steering should be incorporated within the track drive. For the initial recommendation from Chrysler, the choice was to use twin propellers and vary the pitch to steer the machine. This saved weight and space and allowed for 13 hours of water operation at 8mph.
Positions of one of the auxiliary drive units. Source: Chrysler Corporation
The Final Designs
After all of the development work, there were 5 main possibilities for the LVTPX12 recommended by Chrysler, all with the same basic dimensions, 26’ long by 10.5’ wide by 8.5’ high (7.9m x 3.2 m x 2.6m), and all of which met the requirements from the Navy, although the report from Chrysler was clear that only concepts 1 or 2 were ideal:
The final designs were based upon a final vehicle weight (unladen) of 45,000 lbs (20.4 tonnes) although some of them went as high as 53,670 lbs (24.3 tonnes) and 26 feet (7.9 m) long. Bow fenders would wrap 150 degrees around the front sprockets with the ability to retract for operation on land. The design would have stern baffles with a contravane extending 4” (101.6 mm), also retractable for land use.
Side skirts were also to be added. They improved water speed and it did not matter what they were made of, just so long as they were smooth and extended to the level of the bottom of the hull. The type 3 bow shape with type 1 grouser were also to be used.
Original requirement was 8 mph (12.8 km/h), but the design was calculated to be able to achieve 10.7 mph (17.2 km/h), although testing only went as high as 9.55 mph (15.4 km/h).
Final hull profile of the LVTPX12. Source: Chrysler Corporation
Protection
The hull was to use a modern generation of high hardness steel developed by Chrysler Defense Engineering providing the ballistic protection required making the vehicle lighter than it would be with an aluminium hull, as it permitted the hull to be semi-monocoque. Consideration had been given to a dual-hardness steel hull, but although this could save 1090 lbs (494 kg) in weight, the costs involved were considered too high to be justifiable. The same went for the idea of using titanium or ceramics within the armor; the costs simply did not justify the small additional benefits.
Structural framework for the LVTPX12. Source: Chrysler Corporation
The top of the hull, including the cargo hatch, was to be made from military-grade steel (MIL-S-12560), 0.375” (9.5mm) thick with a nylon blanket backing. The sides, front and stern were made from BHN-500 steel, 0.31” (8mm) thick, and the bottom from military-grade steel (MIL-S-12560) too, 0.375” (9.5mm) thick, with structural elements made from either US Steel’s T1 high strength alloy or Cor-Ten low alloy steel as they were far more resistant to corrosion. The flooring inside the vehicle was to be aluminium paneling as were the fenders and external baffles
Protection had been required to defend against shell fragments and small arms fire only, and the use of a steel hull met these requirements. As for armament, Chrysler exceeded the requirements for either a 20mm or a machine gun by adding both. The 20mm Hispano-Suiza cannon and machine-gun were to be mounted coaxially, forwards on the hull in a small 360º rotating turret with 12º of depression. Just 325 rounds of ammunition for the cannon could be carried, but, along with 700 rounds for the 7.62mm machine-gun, provided adequate firepower for the vehicle. Spent casings from the cannon were ejected overboard via an ejection port, but spent cases from the machine-gun were simply to be collected internally. Additional firepower could be given by the mounted troops for whom small arms ports were provided.
LVTPX-12 ‘Track Propelled’ version. Source: Chrysler CorporationLVTPX-12 ‘Screw [Propeller] Propelled’ Version. Source: Chrysler Corporation
Suspension
During trials, the multiple small wheels had been shown to have far too little travel, so the vehicle to be built was to have 6 large rubber-tyred road wheels on each side instead. These were supported on torsilastic springs cantilevered out from the sides of the vehicle. Drive was delivered to the sprockets at the back, pulling the rubber padded single pin track. The front idler was compensated to account for track movement during amphibious driving and was used to tension the track too.
Transmission
The transmission for the LVTPX-12 design was a complex problem. The engine would have to deliver in excess of 600h p (recommended to be 800 hp) through the tracks to power the vehicle, which would still only deliver a top speed of 16 mph (25.7 km/h) on land. Various solutions over different types of transmission were considered, all of which were going to be more suitable than using the transmission from a tank like the LVTP-5 had done.
Chrysler concluded that for the final design a new transmission should be developed by a Phase II contractor of a type recommended by Chrysler. Chrysler were prepared to develop this new transmission but not out of their funds. They were clear it would have to be a government-funded and owned project only.
Artist’s conception of the LVTPX12. Source Hunnicutt
Crew
The vehicle itself was to feature just three crew members. A driver positioned in the front left, an assistant driver in the front right and the commander acting as the gunner stood who centrally with his head in the small turret at the front. Seating at the back was provided for 25 troops on benches, although, had the LVTPX-12 been accepted for service, it is likely this area would have been adapted for a variety of other uses too from mortar carrier to recovery vehicle all on the same platform. Access for personnel was via either the large cargo hatch above the troop compartment, the large rear powered ramp, or crew hatches. Two hatches were at the front, with one each for the driver and co-driver, and there were two emergency escape hatches in the vehicle with one on each side of the hull.
LVTPX-12 model completed 1967 in an early form with boat-shaped front, which was later abandoned.
Outcomes
Chrysler’s model LVTPX-12 development team had been tasked with producing an amphibian vehicle capable of 8 mph and yet was calculated to be able to manage over 10 mph. In all areas, this design surpassed the LVTP-5, providing for improved armament and performance. The problems of making an amphibian APC were obvious during the development. A large amphibian was simply ill suited to both land and sea operations. Either too heavy for the sea or ill protected for the land. Big, bulky and cumbersome, these vehicles, packed with troops, were to be the amphibious assault vehicles for the US Marine Corps. In comparison with the LVTP5-A1, the LVTPX12 was considered by Chrysler to be a better design and still manageable within the budget constraints imposed by the military.
LVTPX-12 possible prototype hull No.1 during trials. The ‘guns’ appear to be dummies with the cannon below the machine gun rather than coaxial. The lines are clean and smooth but the front has lost its boat shape. Photo: snafu-solomon.com
The US military continued with development of the amphibian as fighting in Vietnam had shown the extreme vulnerability of these vehicles to mines in particular and the requirements of 1964 had changed from high speed beach assault to more emphasis on land operations. The LVTPX-12 design was therefore modified to a more modest vehicle and subsequently the LVTPX-12 was manufactured as a prototype first in September 1967 and later as a batch of 14 more prototypes by Food Machinery Corporation (FMC), which were finished by 1969. It was still the ‘Landing Vehicle Tracked LVTPX-12’, but not for long.
The engine and transmission had been relocated and it was only an LVTPX-12 in name. At least three prototypes and possibly as many as 10 were manufactured under the LVTPX-12 name, but are easily mistaken for the LVTP-7, as the design was modified in favor of a smaller size and weight and refined further. The finished vehicles were smaller, but the work on the original LVTPX-12 was not wasted. It produced valuable experience and lessons for the military.
One prototype vehicle which underwent tests around June 1969 was reported as being made from aluminium instead of steel as originally planned. This switch to aluminium is also confirmed by Hunnicutt, who states that the LVTPX-12s made for trials were made from 5083 aluminium, just like the M113 APC. The Chrysler prefered engine was changed for the smaller 8V53T diesel producing just 400 hp and the torsilastic suspension was changed to torsion bars.
The LVTPX-12 program might not have been successful in itself, but it continued into what was to become the LVTP-7 program instead. By this time, very little of the original form of the LVTPX-12 remained. Gone were the boat shaped front, the central front turret, and side egress doors, and the visual similarities with the LVTP-7 make identification and tracking of the vehicle from this point almost impossible.
Following successful trials of the LVTPX-12 at Aberdeen (Maryland), Yuma Proving Grounds (Arizona), Fort Greely (Alaska), and in Panama it was accepted for service, and the LVTPX-12 name was almost completely dead by 1969, when it was officially redesignated LVTP-7 in this new form and it entered service with the US Marine Corps in 1972, replacing the LVTP-5 completely by 1974.
LVTPX-12 3rd prototype seen during trials about 1970. Very little of the original LVTPX-12 remains. Source: US Marine corps
Epilogue
The fate of these prototypes is not known, although two did get modified into test beds of the LVTRX-2 recovery vehicle with a 30,000 lb (13.6 tonne) winch fitted to the vehicle roof. The weapons cupola was removed at that point. Other experiments were the LVTCX-2 as a Command Variant and LVTEX-3 as an Engineering variant. A final variant planned but never built was the LVTHX-5 with a turret mounted 105mm gun, but all of these had little to do with the original LVTPX-12 and were now firmly in the realm of the LVTP-7.
Planned but never built LVTPX-12 based LVTHX-5 with turret-mounted 105mm gun. Source: Hunnicutt
Strangely, although the LVTPX-12 was ‘dead’ by 1969, the name crops back up again in 1982 with Congress allocating money to design and construct 2 sets of hydropneumatic suspension units for the LVTPX-12 along with clear armor inserts, suggesting the vehicle was still serving, performing a continuing role for testing and evaluation.
LVTPX-12 10th Prototype during trials with the 4th Marine Division at Camp Pendleton (California) in about 1971. One of two prototypes was received there for familiarisation training. Source: USMC and Hunnicutt
At least one of the original prototype vehicles survives at the Allegheny Arms and Armor Museum, Pennsylvania.
Surviving LVTPX-12 prototype number 12. Source: Harold Biondo
Illustration of the Assault Amphibian Personnel Carrier LVTPX-12 produced by Jarosław Janas, funded by our Patreon Campaign.
Specifications LVTPX-12 Track-Propelled Version
Dimensions (L-w-H)
26 x 10.6 x 8.6 feet (7.9 x 3.2 x 2.6 meters)
Total weight, battle ready
51,990lb (23.6 tonnes, combat laden) with 10,000lb (4.5 tonnes) payload
1 x 1 x .50 cal. (12.7 mm) Browning M2 Heavy machine gun
Armor
Welded 5083 aluminium
Sources
Final Engineering Report on the LVTPX12, Vol.1 Technical Study. (1965 ). Chrysler Corporation, Detroit.
The Water Performance of Single and Coupled LVTP7’s, with and without bow plane extensions. (1980). Irmin Kamm and Jan Nazalwicz. Ship Research and Development Center, Office of Naval Research, Department of the Navy.
The Stability of the amphibious Craft LVTPX-12 in Waves and Surf. (1968). Robert Patterson. Massachusetts Institute of Technology, Department of Naval Architecture.
Evaluation of LVA Full-Scale Hydrodynamic Vehicle Motion Effects on Personnel Performance. (1979). William Stinson. Naval Personnel Research and Development Center.
Bureau of Ships Preliminary Specification for Assault Amphibian Personnel Carrier (LVTPX12), (1964). Bureau of Ships
US Marine Corps FY82 Exploratory Development Program. (1982). Marine corps Development and Education Command
LVTPX-12 Accepted. (November 1967). J.H. Alexander. Marine Corps Gazette Vol. 51, Issue 11
Special Test for LVTPX-12. (June 1969). Marine corps Gazette Vol.53, Issue 6. Amtracs: US Amphibious Assault Vehicles. (1999). Steven Zaloga, Terry Handler, Mike Badrocke. Osprey New Vanguard No.30 Bradley: A history of American fighting and support vehicles. (1999) R.P. Hunnicutt, Presidio Press
United States of America (1979-1984)
Self-Propelled Gun – 1 Prototype Built
During the mid-1970s, the US Military determined that there was a need to update, replace or overhaul their existing and aging fleet of self-propelled guns (SPG). The focus was on the replacement of the M109 SPG and several options were available. The US Army could select a foreign vehicle such as the French GCT, or the Italian/UK/German SP-70 project, or a new project could be started. The military, unsurprisingly, selected a US-based program and had to consider whether to replace the whole fleet with a common chassis fulfilling roles of command, resupply, and repair or instead, just modernize/upgrade the existing fleet.
Artist’s impression of the FMC M109 Maxi-PIP project. Source: Janes
The Flaws
The existing US SPG fleet was a mix of vehicles, calibers, and ages. There was no simple common Ammunition Resupply Vehicle (ARV) either, and a common vehicle platform for both an artillery system and its resupply vehicles would have obvious advantages for parts, supplies, logistics, and training. The work on FMC’s own platform for all of this had been discontinued already though.
The rate of fire for existing in-service SPG’s was also too slow, of the order of just 4 rounds per minute manually loaded. The US Army wanted to improve on this and an automatic loader would achieve this with up to 12 rounds per minute being possible. Another problem was that the crews of existing SPGs were too large, which lead to logistical problems such as training and maintaining these soldiers in the field. An automatic loader and automatic subsystems would help reduce this human burden.
In particular, the existing engine of the M109 was considered underpowered for its role. An improved power-to-weight ratio of 20 horsepower per ton was set for the upgrade project along with improved reliability. The M109 was a product of the 1950s and simply did not reflect the realities of modern warfare. It was vulnerable to counter-battery fire from Soviet artillery as it took too long to stop, fire, and then move on. Modernized fire control systems, gun elevation motors, and ground mapping would allow the improved vehicle to fire, move, and fire again to reduce successful enemy retaliation. Finally, the old M109 just did not have the range needed to counter fire the Soviets, which was a huge tactical weakness. These requirements formed the basic needs of the Howitzer Improvement Program (HIP).
Howitzer Improvement Program
The 155 mm gun caliber would remain, but the barrel had to be between 38 calibers (5.89m) and 50 calibers (7.75m) long. It had to be able to fire all current and future 155 mm rounds and have a range of 25 to 30 km when using High Explosive Rocket Assisted (HERA) ammunition. Either a fully or semi-automatic loading system was needed to increase the rate of fire and reduce the number of crewmen. New electronics were also needed to enable a 1-minute fire-move-and-fire-again cycle, along with a facility to fire a 3 round burst in 10 seconds. Increased ammunition capacity of at least 50 shells was also demanded.
Artist’s impression of the FMC M109 Maxi-PIP project. Source: JanesThe mock-up vehicle on display. Source: Ed FrancisRearview of the same mockup showing the resupply doors open. Source: Ed Francis
FMC M109 Modification Proposal
When the original FMC DSWS project was canceled, FMC had luckily also submitted a proposal to update the existing M109 fleet. It was as an alternative to their own proposal for a completely new vehicle with the 155 mm L/45 gun. The upgrade/update idea though was to combine the old M109’s with some of the elements from the completely new vehicle proposal.
This would include the new suite of electronics which would improve accuracy from the same 155 mm L/45 gun but the most obvious and important change would be the switch to an automatic loading system. Fed from two large drums in the back of the turret, the 155 mm shells would be replenished by means of two circular hatches at the bottom of each door. Both doors could also be opened to allow for complete inspection or repair of the drums. The autoloader would also decrease the crew for the vehicle by eliminating the need for one of the loaders.
This upgraded M109 would be marketed under the name M109 Maxi-PIP (Product Improvement Program) and had the advantage of retaining the turret (albeit modified) of the M109. A wooden mockup was shown to the military and received sufficient interest to have a single test chassis produced based on an M109. This prototype weighed in at just over 29 tonnes.
M109 Maxi-PIP weighed mockup. Source: US Army
The M109 Maxi-PIP was still under development in 1982 with an existing M109 chassis modified to simulate the new 29-ton (26.3 tonnes) vehicle weight. The engine fitted was a 500 hp Detroit-Diesel 8V71TA and was subjected to the NATO 400 hour engine test. Tests were still scheduled to take place with this engine into 1983. Various other types of engines were considered but 500hp in a 29-ton (26.3 tonnes) vehicle would only produce 17 hp/t which was not the required 20hp/t wanted, therefore this new vehicle was not able to provide the required mobility improvements.
Conclusion
The M109 PIP from FMC faded away and was completely canceled by 1984 with the decision being made at the time to simply modify the M109 fleet with new ammunition stowage and a longer range gun. Pacific Car and Foundry (PCF) had also made its own proposal to fulfill the requirements for the future artillery system under the name ‘Self Propelled Artillery Weapon’ (SPAW). The PCF proposal was also a fully automatically loaded gun system but was capable of firing unassisted shells to a range of 30km and to 40km with a rocket-assisted projectile. The SPAW would have had a crew between 2 and 4 and with an engine providing a power to weight ratio of between 20 to 25 hp/t and could move at up to 40km/h off-road. Neither project could meet the Army’s needs and, as a result of the failure to develop or accept a replacement, the existing M109’s soldiered on.
Artist’s impression of the ammunition stowage and loading system on the Maxi-PIP. Source: Richard Eshleman
As with many of these multi-year huge contracts in the US, this one is an enormous project of overlapping requirements. The HIP program did not end with FMC or PCF concepts though and was still going on into 1991. This was the date by which the vehicles for the program were meant to have been entering service yet development hadn’t even finished and only 8 prototype improved vehicles for the entire program had even been made by 1989.
The project was simply too large and phenomenally expensive. In 1989 alone, for example, the HIP program cost nearly US$28.5 million and nearly US$10.5 million the following year. It didn’t matter anyway for FMC. Their initial proposal had been rejected, as was their M109 improvement. The project was somewhat of a failure, no new vehicle was produced and a huge amount of financial resources was spent. The opportunity for a new and more capable platform producing a new family of vehicles was lost. The PIP had not managed to meet the needs for a future artillery system and the US finished out the 1980’s behind the Soviets in terms of self-propelled artillery, unable to select or develop a suitable M109 replacement.
Illustration of the M109 Maxi-PIP produced by Pavel Alexe, funded by our Patreon Campaign.
Specifications
Armament
155 L45 main gun, one cupola mounted .50 cal heavy machine gun
Ammunition
50 rounds in two 25 round drums with fully automatic feed capable of firing unassisted projectiles to 23km
Sources
GAO Report AD-A141 422 M109 to M109A5 Report, March 26th 1984
Janes Armour and Artillery 1984-5
US Army Tank Automotive Command Laboratory Posture Report FY 1982, US Army
Research Development and Evaluation Army Appropriation descriptive summaries, January 1990, US Army Congressional Report
Report ARLCD-CR-81053, Demonstration Prototype Automated Ammunition and Handling System for 155mm Self-Propelled Howitzer Test Bed, December 1981, US Army ARRADCOM
United States of America (Mid-1970s)
Mine Clearing Vehicle – 1 Built
Minefields are, quite rightly, well feared by troops and commanders alike. Hidden, silent killers, these weapons can lie dormant for years and cripple men and machines alike. With the Cold War stand-off between NATO and the Warsaw Pact in full flow, both sides planned to make extensive use of minefields to disrupt enemy movements and attacks. The side with the fastest and most efficient means of clearing a path through an enemy’s minefield would obviously have a significant advantage in a war.
Early research work with turning Fuel Air Explosive (FAE) technology into weapons was undertaken by the US Navy in the early 1960s at their China Lake Naval Weapons Center in California. By the mid-1970s, research had progressed sufficiently to weaponize FAE technology into two primary weapons systems: one ground-launched which was developed in conjunction with the US Army Missile Command (MICOM), the ‘Surface Launched Unit’ (SLU-FAE); and one delivered by air, the CBU-55/72. The design was completed by 1975, and prototype firings ready that year for testing the SLUFAE for its intended primary role, defeating enemy minefields. This evaluation was done in conjunction with the US Army Mobility Equipment Research and Development Center (MRDC) at Fort Belvoir, Virginia. The ‘Surface-Launched Unit, Fuel Air Explosive’ or ‘SLUFAE’ mounted on the M548. This photo shows the arrangement of the tubes in the POD. Photo: US Army
The SLUFAE System
The SLUFAE system consisted of a single giant octagonal ‘pod’ containing 30 smooth walled 35cm diameter tubes, although the original artwork for the program had shown 36 tubes in a rectangular pod and then confusingly described it as a ‘30-tube’ system. These barrels were able to the fired individually or ripple fired at intervals variable from 1.0 seconds to 9.7 seconds in 1/10 second intervals. The whole system could throw all 30 rockets in sequence which was capable of breaching an 8m wide path 900m long. The minimum safe detonation distance was 100m so the carrier could park as close as 100m from the edge of the minefield and launch the rockets. Uncamouflaged SLUFAE during test firing. The very large size of the rocket is apparent. Photo: US Army
The whole pod was to be mounted on a ground vehicle and the vehicle selected was the M548 Tracked Cargo Carrier vehicle, although it has also been described as being based on the M752 Lance Missile Carrier which was being decommissioned as a platform at the time.
Stowed horizontally on the back of the M548, the POD stuck up well above the vehicle line and could be elevated up to a maximum of 30 degrees when the POD was to be deployed. SLUFAE rocket launched from the camouflaged POD on the M458. Use of such a system was liable to draw a lot of enemy attention. Photo: Zaloga via US Army Rear of the SLUFAE showing the use of the POD mounted crane arm for reloading these large rockets. Photo: Yuri Pasholok
The rocket
The XM130 SLUFAE (also sometimes written as ‘SLU-FAE’, was a 2.55 m long, 345 mm diameter, 84.8 kg unguided rocket fitted with an XM750 Slowed Nose Probe (discriminating against the effects of foliage) and Mild Detonating Fuze. Propelled by a 5” (127 mm) ‘Zuni’ rocket motor inside the launching tube body, this would propel it from the vehicle-mounted tube out to a maximum range of 1000 m, although 700m was deemed to be the effective limit. Preserved SLUFAE rocket (center, dark green) at the Hawthorne Ordnance Museum, Nevada. Photo: Courtesy of the Hawthorne Ordnance Museum
Once over the target, the rocket was retarded by a parachute in the tail shroud and the main charge, consisting of 45 kg of Propylene Oxide (PO) explosive liquid, was burst over the target forming a cloud 12’ x 54’ (3.7 m x 16.5 m) which was then ignited (150/1000 second delay) causing a huge explosion and overpressure on the target which would subsequently detonate any mines. An inert version for training use was designated XM131. Accuracy for this unguided system was poor though. with a dispersal of 2.6 m laterally and 6 m in range for every 300 m traveled, meaning a maximum deflection of 8.6 m laterally and 20 m in range leaving a chance that at the end of the lane of cleared mines that some mines may not have been covered by the overpressure. Diagrammatic break down of the XM-130 SLUFAE rocket showing the large payload (8), burster charge (9) at the front and the Zuni rocket tube (3) behind. The retarding parachute is marked at (5). Photo: Dept. of Defense
The Cargo Carrier M548 fitted with the large Surface-Launched Unit, Fuel Air Explosive (SLUFAE) launcher fitted to the rear of the vehicle. Illustration by Andrei ‘Octo10’ Kirushkin, funded by our Patreon Campaign.
Testing
Testing of the SLUFAE on the M548 took place in 1975, with further tests throughout 1976 and 1977. Consideration was given to the effectiveness of ground-pressure detonation of mines, including tests of the FAE system (although not SLUFAE rockets) on frozen ground in Alaska, which provided concern over their effectiveness, particularly against frozen or partially frozen soils. By 1981, further studies were recommended into the performance degradation of this type of system in cold temperatures and against the frozen or thawing ground. Montage showing demonstration of SLUFAE rocket against a target building at China Lake and alternative deployment of FAE device by helicopter. Photo: British Ordnance Collectors Network
The overpressure effects on vehicles and troops were devastating. Trucks were crushed by the overpressure and exposed troops would be killed or seriously injured. Light structures such as houses were seriously damaged, but the effect was very small against armored targets. The primary intended use had been seen in using overpressure against landmines causing them to detonate and under normal temperate conditions, it had worked. The use of FAE had even worked for underwater mines, making it suitable for use in clearing mines laid below the water line on a beach, but the carrier was unprotected and the whole system was huge. Demonstrated effect of FAE explosives in 1975 showing a 2 ½ ton standard US Army truck completely crushed by the overpressure blast which also set it on fire and blew off major parts. Photo: US Army
Future Developments
The SLUFAE system was eventually not adopted for use. In the 1998 patent for an improved version of FAE mine clearance, a description of the SLUFAE rockets put the maximum range to just 700 m and that to ensure mines are destroyed a lot of overlap was required to destroy single impulse mines or ones buried in excess of 15cm deep. As a result, the clearance area from 30 rockets was just 8 m by 160 m, substantially less than the 700-1000 m lane originally intended. This is likely the key reason the system was not adopted. It just was not reliable enough. Systems such as ‘Giant Viper’ were more effective and provided a cleared lane through a minefield by virtue of the 183 m long hose filled with PE6/A1 High Explosive. That system was much simpler logistically as it was carried in a trailer and could be brought to a designated area by almost any vehicle rather than relying upon a dedicated and much bigger tracked carrier.
The SLUFAE was a good idea but was unsuitable for actual combat. The USMC, who was particularly interested in amphibious assault vehicles, looked at the Army’s SLUFAE for their own use in 1987. They concluded that “this system is not compatible with Marine Corps amphibious assault and tactical vehicles, does not provide a breaching capability starting at the high watermark, and does not meet the Marine Corps stated requirements”.
The development of SLUFAE had been quick in military terms, completing development and being officially accepted in December 1980 (FY 1981). It had been pursued, however without sufficient testing under different terrain conditions and the tactical disadvantages of this large, vulnerable and conspicuous machine were readily obvious. It was duly shelved and received no procurement orders.
Conclusion
By the 1990’s, FAE technology had continued with the addition of aluminum particles to increase the overpressure from the blast, but the SLUFAE rockets were gone. Nothing is known about the location of the SLUFAE launcher, but at least two rockets survive. One in a private collection and one in the collection of the Hawthorne Ordnance Museum in Nevada. Minefield clearance with FAE from Patent US4967636A preparing the route for a tank. Photo: US Patent US4967636A
The original design had morphed to consider the use of a flexible hose containing FAE launched in a manner similar to that of the ‘Giant Viper’ system. Instead of exploding in the air, this version of the SLUFAE system would explode on the ground instead. The means of destruction was the same though – the creation of a pressure wave to detonate the mines. The system was never adopted though and production of the SLUFAE was limited to a single prototype.
The original SLUFAE rocket POD survives at Redstone Arsenal, Alabama. Source:OberstBahn via Reddit.
Sources
Osprey Publishing, New Vanguard #252: M113 APC 1960-75, Steven Zaloga
Special Report 81-20, Mine/Countermine Problems during Winter Warfare, Virgil Lunardini, September 1981
NAWCWD Quick Facts, China Lake and Point Mugu, California, March 2008
Department of Defense Military Handbook – Fuzes, April 1994
William Stirrat, US Army Armament Research and Development Center Large Calibre Weapon Systems Laboratory, Minimum nonpropagation distance for the cloud detonator of the XM130 SLUFAE rocket, February 1984
Infantry Magazine Vol.66, US Army, March-April 1976
Jai Agrawek, High Energy Materials: Propellants, Explosives and Pyrotechnics.
James Dennis, MERDC Demonstrates Fuel Air Explosive Mine Neutralization Capabilities, US Army Research and Development Bulletin January-February 1975
US Patent US4967636A filed 23rd September 1988
Canadian Patent CA2197508, Land Mine Destroying and Disabling System, 13th August 1998 and 30th November 1999
Required Operational Capability for Amphibious Continuous Breach and Land Mine Countermeasure System. Department of the Navy, 1987
Remote Controlled Vehicle Mounted Minefield Detector System, US Army Mobility Equipment Research and Development Command. November 1982
US Army Mobility Equipment Research and Development Plan, March 1981
FY 1982 Department of Defense Program for Research Development and Acquisition
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish. Cookie settingsACCEPT
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.
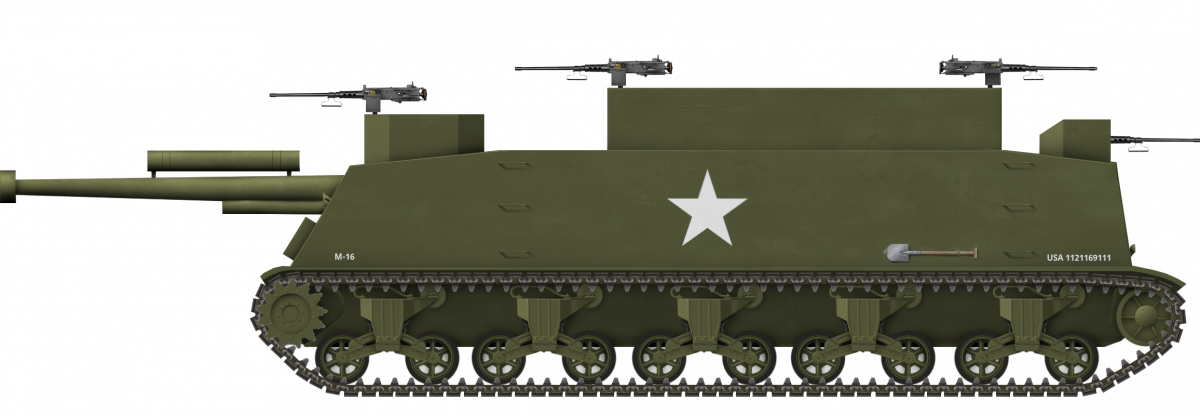
 United States of America (1962)
United States of America (1962)